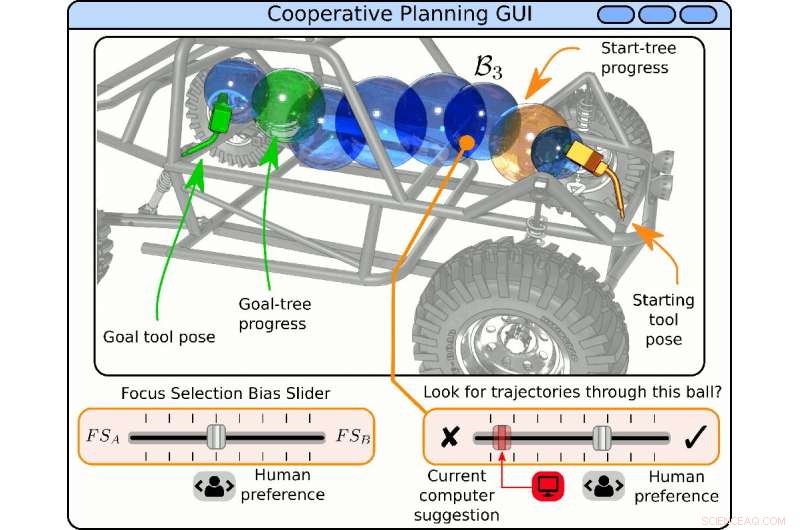
Esta imagen muestra una interfaz gráfica de usuario de planificación cooperativa, tal como se aplica en una configuración de soldadura de ensamblaje de jaula antivuelco. Inicialmente, el planificador de ruta tiene la tarea de mover la herramienta de soldadura de la "postura de la herramienta inicial" a la "postura de la herramienta objetivo". Si el planificador de rutas encuentra dificultades para producir una solución, notifica a los operadores humanos, quien luego creará una serie de bolas que constituyen una pista de cómo el robot debe moverse de la "postura de la herramienta inicial" a la "postura de la herramienta objetivo". Los operadores humanos pueden mover las bolas, cambiar el tamaño de las bolas y esencialmente deformar la cadena de bolas hasta que el planificador de rutas sea capaz de explotar las pistas dadas. Crédito:pradeep rajendran.
Los investigadores del Centro de Fabricación Avanzada de USC Viterbi identifican un algoritmo para optimizar los robots para proporcionar Soluciones libres de colisiones en espacios de fabricación complejos.
Imagine una planta de montaje de automóviles:es necesario realizar miles de tareas repetitivas a diario, como insertar un volante en un automóvil. Una vez que el robot aprende la mejor trayectoria para llegar del punto A (donde se apilan las ruedas) al punto B (donde se debe insertar la rueda), puede ejecutarse en esto millones de veces, sin errores ni colisiones.
Sin embargo, si esta tarea se cambia aunque sea levemente, por ejemplo, aumentando el tamaño de la rueda, el robot no podrá completar la tarea.
Para ayudar a automatizar robots para proporcionar soluciones de alta calidad incluso en escenarios de fabricación complejos, Investigadores del Centro de Fabricación Avanzada (CAM) de la Escuela de Ingeniería de Viterbi de la USC identificaron un nuevo enfoque para automatizar las rutas de los robots a través de sus espacios de trabajo. En una investigación presentada en la Conferencia Internacional sobre Robots y Sistemas Inteligentes el 4 de noviembre, 2019 en Macao, Porcelana, el equipo de investigación, incluido el profesor SK Gupta, Smith International Professor in Mechanical Engineering y director CAM, y Ph.D. candidato Pradeep Rajendran, propuso una interfaz y un algoritmo de planificación de rutas novedosos que guía a los robots a tomar el camino más corto, ruta más rápida desde un punto de origen a un punto de destino en un espacio de trabajo con una mínima intervención humana.
"Proponemos un enfoque para obtener retroalimentación humana durante la planificación de ruta automatizada para manipuladores que operan en espacios de trabajo muy complejos, por ejemplo, operaciones de montaje de satélites, ", Dijo Rajendran." Normalmente, Los operadores de robots utilizan un planificador de rutas automático para planificar una trayectoria para que el robot complete la tarea dentro del espacio de trabajo. Si la planificación de la ruta falla, lo que significa que la trayectoria propuesta no produce los resultados deseados, los operadores del robot deben ingresar puntos de ruta manualmente, puntos específicos a lo largo de la ruta para guiar al robot desde su origen hasta su destino ".
Esta situación surge con mayor frecuencia en espacios de trabajo complejos o confinados, como la operación de ensamblaje de satélites, donde las geometrías del espacio de trabajo más difíciles, los obstáculos físicos y los cambios o la personalización más frecuentes requieren que los robots ejecuten rutas complejas. Como resultado, Los operadores de robots pierden un tiempo valioso ingresando información manualmente para cada escenario, derrotar el propósito de usar la automatización en primer lugar.
El algoritmo funciona proporcionando una interfaz fácil de usar para que el robot recopile información del operador humano al principio de la planificación de la ruta, el proceso de mapear la ruta que el robot debe tomar a través del lugar de trabajo para realizar su tarea. Se alerta al operador humano, a través de señales visuales en el programa, a las áreas más complejas que el robot necesitará navegar y puede proporcionar información en consecuencia, para producir directivas de alto nivel. Como resultado, cuando el robot encuentre ligeras alteraciones en su tarea, como el aumento del tamaño de la rueda antes mencionado, podrá utilizar estas directivas y ajustar su trayectoria en consecuencia.
El método ideado por investigadores del Departamento de Ingeniería Mecánica y Aeroespacial de la USC Viterbi, que también incluye al investigador asociado postdoctoral Ariyan Kabir, Doctor. el estudiante Shantanu Thakar y el científico investigador de CAM Brual Shah:prioriza la automatización, asegurarse de que el programa de planificación de rutas solo obtenga ayuda cuando sea necesario. Por lo general, se necesitan de 15 a 30 minutos para especificar una ruta manualmente; con el algoritmo de planificación de rutas, la ruta se puede generar en unos pocos segundos.
"En la fabricación de pequeño volumen, los robots realizan muchas tareas no repetitivas que cambian con frecuencia. Programar robots para cada una de estas iteraciones de tareas no solo requiere mucho tiempo, es tedioso e ineficaz, ", Dijo Rajendran." Con este nuevo algoritmo, demostramos que muchos procesos no repetitivos que se encuentran en aplicaciones de fabricación de pequeño volumen se pueden automatizar fácilmente, con una participación mínima de operadores humanos ".