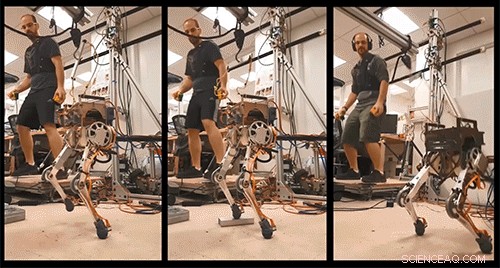
Joao Ramos teleopera Little HERMES, un robot bípedo que puede imitar el equilibrio de un operador para mantenerse erguido mientras corre, caminando, y saltando en su lugar. Crédito:Joao Ramos y Sangbae Kim
Rescatar víctimas de un edificio en llamas, un derrame químico, o cualquier desastre que sea inaccesible para los socorristas humanos podría algún día ser una misión para resilientes, robots adaptables. Imagina, por ejemplo, bots de rescate que pueden atravesar los escombros a cuatro patas, luego levántese sobre dos piernas para apartar un obstáculo pesado o atravesar una puerta cerrada.
Los ingenieros están avanzando en el diseño de robots de cuatro patas y su capacidad para correr, saltar e incluso hacer volteretas hacia atrás. Pero tener dos piernas Los robots humanoides para ejercer fuerza o empujar contra algo sin caerse ha sido un obstáculo importante.
Ahora, los ingenieros del MIT y la Universidad de Illinois en Urbana-Champaign han desarrollado un método para controlar el equilibrio en un Robot teleoperado:un paso esencial para permitir que un humanoide lleve a cabo tareas de alto impacto en entornos desafiantes.
El robot del equipo físicamente parecido a un torso mecanizado y dos piernas, es controlado de forma remota por un operador humano que lleva un chaleco que transmite información sobre el movimiento del ser humano y las fuerzas de reacción del suelo al robot.
A través del chaleco el operador humano puede tanto dirigir la locomoción del robot como sentir los movimientos del robot. Si el robot comienza a volcarse, el humano siente un tirón correspondiente en el chaleco y puede ajustarse de una manera para reequilibrarse tanto a sí mismo como, sincrónicamente, el robot.
En experimentos con el robot para probar este nuevo enfoque de "retroalimentación de equilibrio", los investigadores pudieron mantener de forma remota el equilibrio del robot mientras saltaba y caminaba en sincronía con su operador humano.
"Es como correr con una mochila pesada:puedes sentir cómo se mueve la dinámica de la mochila a tu alrededor, y puedes compensarlo adecuadamente, "dice Joao Ramos, quien desarrolló el enfoque como un postdoctorado del MIT. "Ahora, si quieres abrir una puerta pesada, el humano puede ordenar al robot que arroje su cuerpo a la puerta y la abra, sin perder el equilibrio ".
Ramos, quien ahora es profesor asistente en la Universidad de Illinois en Urbana-Champaign, ha detallado el enfoque en un estudio que aparece en Ciencia Robótica . Su coautor del estudio es Sangbae Kim, profesor asociado de ingeniería mecánica en el MIT.
Más que movimiento
Previamente, Kim y Ramos construyeron el robot de dos patas HERMES (para mecanismos robóticos altamente eficientes y sistema electromecánico) y desarrollaron métodos para imitar los movimientos de un operador a través de la teleoperación. un enfoque que, según los investigadores, tiene ciertas ventajas humanísticas.
"Porque tienes una persona que puede aprender y adaptarse sobre la marcha, un robot puede realizar movimientos que nunca antes se habían practicado [a través de la teleoperación], "Dice Ramos.
En demostraciones, HERMES ha servido café en una taza, empuñaba un hacha para cortar leña, y manejó un extintor para apagar un incendio.
Todas estas tareas han involucrado la parte superior del cuerpo del robot y los algoritmos para hacer coincidir la posición de las extremidades del robot con la de su operador. HERMES pudo realizar movimientos de alto impacto porque el robot estaba enraizado en su lugar. Equilibrio, en estos casos, era mucho más sencillo de mantener. Si el robot tuviera que realizar algún paso, sin embargo, probablemente se habría volcado al intentar imitar los movimientos del operador.
"Nos dimos cuenta de que para generar fuerzas elevadas o mover objetos pesados, simplemente copiar movimientos no sería suficiente, porque el robot se caería con facilidad, ", Dice Kim." Necesitábamos copiar el equilibrio dinámico del operador ".
Entra el pequeño HERMES. una versión en miniatura de HERMES que es aproximadamente un tercio del tamaño de un adulto humano promedio. El equipo diseñó el robot como simplemente un torso y dos piernas, y diseñó el sistema específicamente para probar tareas de la parte inferior del cuerpo, como la locomoción y el equilibrio. Al igual que con su contraparte de cuerpo completo, Little HERMES está diseñado para teleoperación, con un operador vestido con un chaleco para controlar las acciones del robot.
Para que el robot copie el equilibrio del operador en lugar de solo sus movimientos, el equipo tuvo que encontrar primero una forma sencilla de representar el equilibrio. Ramos finalmente se dio cuenta de que el equilibrio podía reducirse a dos ingredientes principales:el centro de masa de una persona y su centro de presión; básicamente, un punto en el suelo donde se ejerce una fuerza equivalente a todas las fuerzas de apoyo.
La ubicación del centro de masa en relación con el centro de presión, Ramos encontró, se relaciona directamente con el equilibrio de una persona en un momento dado. También descubrió que la posición de estos dos ingredientes podría representarse físicamente como un péndulo invertido. Imagínese balanceándose de un lado a otro mientras permanece enraizado en el mismo lugar. El efecto es similar al balanceo de un péndulo invertido, el extremo superior representa el centro de masa de un ser humano (generalmente en el torso) y la parte inferior representa su centro de presión en el suelo.
Levantamiento pesado
Para definir cómo el centro de masa se relaciona con el centro de presión, Ramos recopiló datos de movimiento humano, incluidas las mediciones en el laboratorio, donde se balanceaba de un lado a otro, caminó en su lugar, y saltó sobre una plataforma de fuerza que medía las fuerzas que ejercía sobre el suelo, como se registró la posición de sus pies y torso. Luego condensó estos datos en medidas del centro de masa y el centro de presión, y desarrolló un modelo para representar a cada uno en relación con el otro, como un péndulo invertido.
Luego desarrolló un segundo modelo, similar al modelo para el equilibrio humano pero escalado a las dimensiones del más pequeño, robot más ligero, y desarrolló un algoritmo de control para vincular y permitir la retroalimentación entre los dos modelos.
Los investigadores probaron este modelo de retroalimentación de equilibrio, primero en un simple péndulo invertido que construyeron en el laboratorio, en forma de viga de aproximadamente la misma altura que Little HERMES. Conectaron el rayo a su sistema de teleoperación, y se balanceaba de un lado a otro a lo largo de una pista en respuesta a los movimientos de un operador. Mientras el operador se balanceaba hacia un lado, el rayo hizo lo mismo, un movimiento que el operador también podía sentir a través del chaleco. Si el rayo se balanceó demasiado, el operador, sintiendo el tirón, podría inclinarse hacia el otro lado para compensar, y mantenga la viga equilibrada.
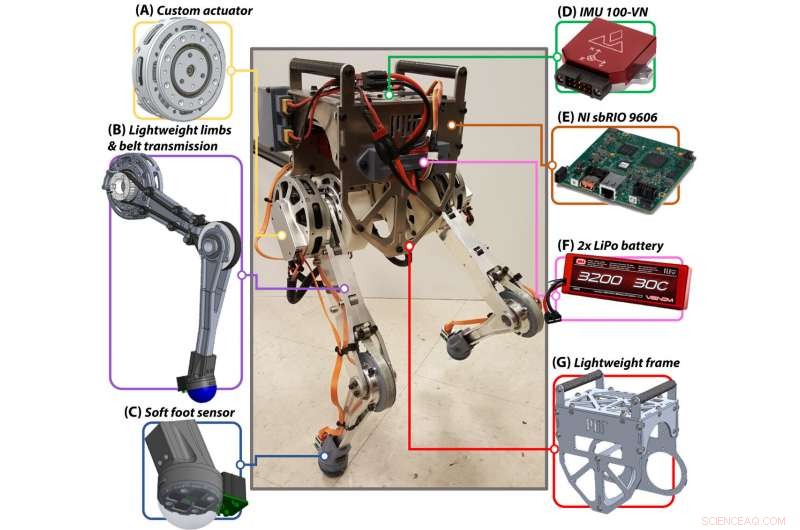
El robot bípedo Little HERMES. Crédito:Ramos y Kim, Sci. Robot. 4, eaav4282 (2019)
Los experimentos mostraron que el nuevo modelo de retroalimentación podría funcionar para mantener el equilibrio en la viga, entonces los investigadores probaron el modelo en Little HERMES. También desarrollaron un algoritmo para que el robot tradujera automáticamente el modelo simple de equilibrio a las fuerzas que tendría que generar cada uno de sus pies. copiar los pies del operador.
En el laboratorio, Ramos descubrió que mientras usaba el chaleco, no solo podía controlar los movimientos y el equilibrio del robot, pero también podía sentir los movimientos del robot. Cuando el robot fue golpeado con un martillo desde varias direcciones, Ramos sintió que el chaleco se movía en la dirección en que se movía el robot. Ramos resistió instintivamente el tirón, que el robot registró como un cambio sutil en el centro de masa en relación con el centro de presión, que a su vez imitó. El resultado fue que el robot pudo evitar volcarse, incluso en medio de repetidos golpes en su cuerpo.
El pequeño HERMES también imitó a Ramos en otros ejercicios, incluyendo correr y saltar en el lugar, y caminar sobre terreno accidentado, todo mientras mantiene su equilibrio sin la ayuda de ataduras o soportes.
"La retroalimentación de equilibrio es algo difícil de definir porque es algo que hacemos sin pensar, "Dice Kim." Esta es la primera vez que la retroalimentación de equilibrio se define correctamente para las acciones dinámicas. Esto cambiará la forma en que controlamos a un humanoide teleoperado ".
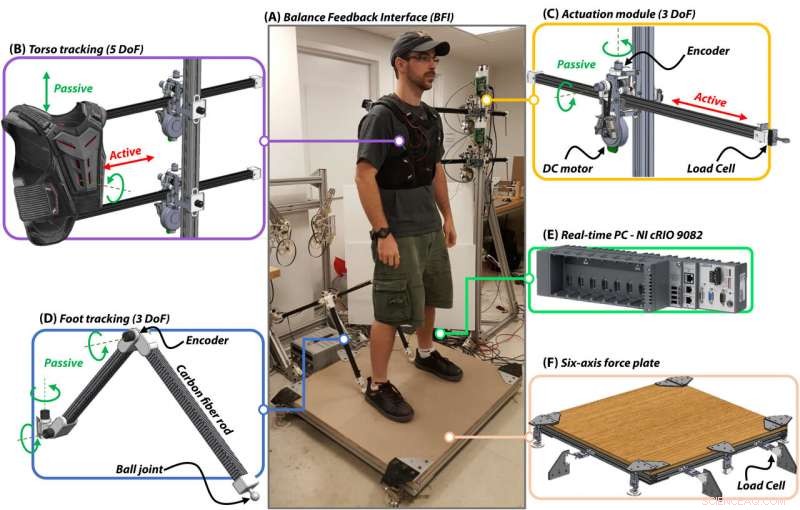
La interfaz de teleoperación para el operador humano. Crédito:Ramos y Kim, Sci. Robot. 4, eaav4282 (2019)
Kim y Ramos continuarán trabajando en el desarrollo de un humanoide de cuerpo completo con un control de equilibrio similar, un día poder galopar a través de una zona de desastre y levantarse para empujar barreras como parte de las misiones de rescate o salvamento.
"Ahora podemos abrir puertas pesadas o levantar o lanzar objetos pesados, con una comunicación de equilibrio adecuada, "Dice Kim.