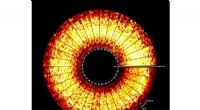
Escaneo LiDAR único (izquierda), los datos superpuestos (derecha) con descripciones (colores) proporcionados por un observador humano y el resultado del software (centro). Crédito:AG Computer Vision der Universität Bonn
Los buenos conductores anticipan situaciones peligrosas y adaptan su conducción antes de que las cosas se pongan difíciles. Los investigadores de la Universidad de Bonn ahora también quieren enseñar esta habilidad a los vehículos autónomos. Presentarán un algoritmo correspondiente en el Congreso Internacional de Visión por Computador que se celebra el viernes, 1ro de noviembre, En Seúl. También presentarán un conjunto de datos que utilizaron para entrenar y probar su enfoque. Facilitará mucho el desarrollo y la mejora de dichos procesos en el futuro.
Una calle vacía, una fila de autos estacionados a un lado:nada que indique que debas tener cuidado. Pero espera:¿no hay una calle lateral más adelante? ¿Medio cubierto por los autos estacionados? Tal vez sea mejor que levante el pie del acelerador, quién sabe si alguien viene por un lado. Constantemente nos encontramos con situaciones como estas cuando conducimos. Interpretarlos correctamente y sacar las conclusiones correctas requiere mucha experiencia. A diferencia de, Los coches autónomos a veces se comportan como un conductor aprendiz en su primera lección. "Nuestro objetivo es enseñarles un estilo de conducción más anticipatorio, ", explica el científico informático Prof. Dr. Jürgen Gall. Esto les permitiría reaccionar mucho más rápidamente ante situaciones peligrosas".
Gall preside el grupo de trabajo "Visión por computadora" en la Universidad de Bonn, cuales, en cooperación con sus colegas universitarios del Instituto de Fotogrametría y el grupo de trabajo "Sistemas Inteligentes Autónomos", está investigando una solución a este problema. Los científicos presentan ahora un primer paso en el camino hacia este objetivo en el simposio principal de la disciplina de Gall, la Conferencia Internacional sobre Visión por Computador en Seúl. "Hemos refinado un algoritmo que completa e interpreta los llamados datos LiDAR, ", explica. Esto permite que el automóvil se anticipe a los peligros potenciales en una etapa temprana".
Problema:muy pocos datos
LiDAR es un láser giratorio que se monta en el techo de la mayoría de los vehículos autónomos. El rayo láser se refleja en el entorno. El sistema LiDAR mide cuando la luz reflejada cae sobre el sensor y usa este tiempo para calcular la distancia. "El sistema detecta la distancia alrededor de 120, 000 puntos alrededor del vehículo por revolución, "dice Gall.
El problema con esto:los puntos de medición se "diluyen" a medida que aumenta la distancia, el espacio entre ellos se ensancha. Esto es como pintar una cara en un globo:cuando lo inflas, los ojos se alejan cada vez más. Incluso para un ser humano, por lo tanto, es casi imposible obtener una comprensión correcta del entorno a partir de un solo escaneo LiDAR (es decir, las mediciones de distancia de una sola revolución). "Hace unos pocos años, la Universidad de Karlsruhe (KIT) registró grandes cantidades de datos LiDAR, un total de 43, 000 escaneos, ", explica el Dr. Jens Behley del Instituto de Fotogrametría." Ahora hemos tomado secuencias de varias docenas de escaneos y las hemos superpuesto ". Los datos obtenidos de esta manera también contienen puntos que el sensor solo había registrado cuando el automóvil ya había conducido unos pocos una docena de metros más adelante. En pocas palabras, muestran no solo el presente, pero también el futuro.
"Estas nubes de puntos superpuestas contienen información importante, como la geometría de la escena y las dimensiones espaciales de los objetos que contiene, que no están disponibles en un solo escaneo, "enfatiza Martín Garbade, quien actualmente está haciendo su doctorado en el Instituto de Ciencias de la Computación. "Adicionalmente, hemos etiquetado cada punto en ellos, por ejemplo:hay una acera, hay un peatón y atrás hay un motociclista ". Los científicos alimentaron su software con un par de datos:un solo escaneo LiDAR como entrada y los datos superpuestos asociados, incluida la información semántica como salida deseada. Repitieron este proceso para varios miles de pares de este tipo.
"Durante esta fase de formación, el algoritmo aprendió a completar e interpretar escaneos individuales, "explica el profesor Gall." Esto significaba que podía agregar de manera plausible las mediciones faltantes e interpretar lo que se veía en los escaneos. "La finalización de la escena ya funciona relativamente bien:el proceso puede completar aproximadamente la mitad de los datos faltantes correctamente. La interpretación semántica, es decir, deducir qué objetos están ocultos detrás de los puntos de medición, no funciona tan bien:aquí, la computadora alcanza una precisión máxima del 18 por ciento.
Sin embargo, los científicos consideran que esta rama de la investigación está todavía en pañales. "Hasta ahora, simplemente ha habido una falta de conjuntos de datos extensos con los que entrenar los métodos de inteligencia artificial correspondientes, "subraya Gall." Estamos cerrando una brecha aquí con nuestro trabajo. Soy optimista de que podremos aumentar significativamente la tasa de precisión en la interpretación semántica en los próximos años ". Considera que el 50 por ciento es bastante realista, lo que podría tener una gran influencia en la calidad de la conducción autónoma.