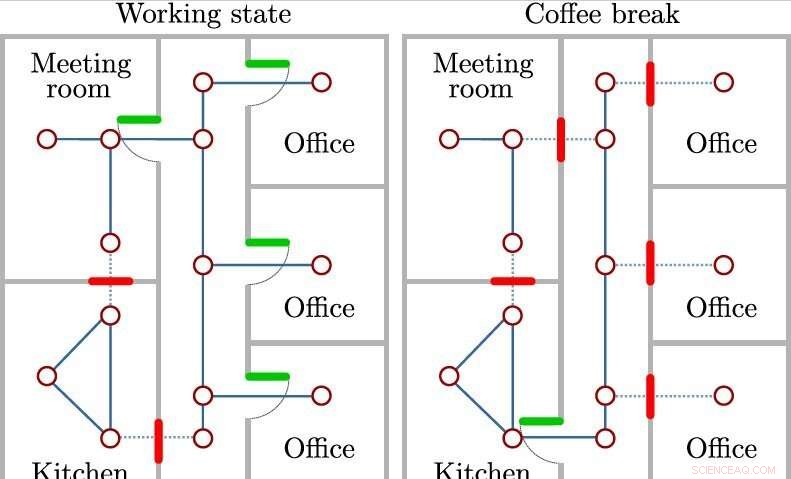
Un ejemplo simple de configuraciones repetidas en una oficina. Crédito:Nardi &Stachniss.
Para navegar eficazmente por sus alrededores, Los robots suelen planificar rutas basándose en mapas prediseñados del entorno en el que operan y en las observaciones recopiladas por sus sensores. Si bien este tipo de estrategia de navegación puede resultar útil en entornos simples y estáticos, está lejos de ser ideal en los más complejos e impredecibles, como los que se encuentran en el mundo real.
De hecho, incluso si los mapas enviados a un robot se han compilado cuidadosamente y son precisos, no tienen en cuenta los obstáculos o cambios inesperados en el medio ambiente. Como la mayoría de los entornos en los que eventualmente se deberían implementar robots (por ejemplo, hospitales, centros comerciales, aeropuertos, etc.) son muy impredecibles y cambian rápidamente, Los enfoques de navegación que se basan principalmente en mapas prediseñados pueden dar como resultado trayectorias y estrategias de navegación deficientes.
Consciente de este problema, dos investigadores de la Universidad de Bonn han desarrollado recientemente un enfoque que podría permitir a los robots navegar en entornos interiores que cambian rápidamente de manera más efectiva durante períodos prolongados de tiempo. Este nuevo enfoque, presentado en un artículo publicado previamente en arXiv, esencialmente funciona capturando patrones repetidos sobre cómo un entorno está cambiando y explotando este conocimiento para tomar decisiones de navegación informadas.
"La idea de este estudio es que muchos cambios en los ambientes interiores ocurren siguiendo patrones espaciales repetidos, por ejemplo, puertas que se abren y se cierran al mismo tiempo, "Lorenzo Nardi, uno de los investigadores que realizó el estudio, dicho TechXplore . "Los robots que se implementan durante períodos de tiempo más prolongados en estos entornos pueden observar y recopilar continuamente información sobre ellos y explotar este conocimiento para planificar mejores estrategias de navegación".
En un estudio anterior, el mismo equipo de investigadores desarrolló un enfoque que recopila información sobre cómo un terreno está afectando la navegación de un robot al aire libre y luego lo usa para calcular trayectorias que minimizan las vibraciones a bordo y el consumo de energía. En su nuevo estudio, decidieron centrarse en la navegación de robots en interiores, prediciendo las diferentes configuraciones que asume un entorno a lo largo del tiempo.
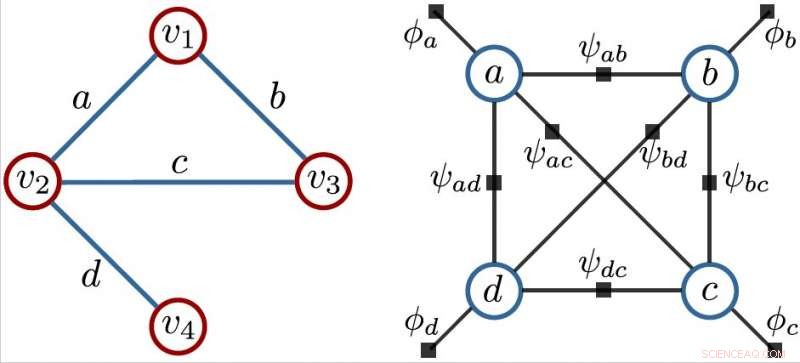
Un ejemplo de topología (izquierda) y el modelo gráfico probabilístico utilizado por los investigadores en su trabajo (derecha). Crédito:Nardi &Stachniss.
El enfoque que desarrollaron está diseñado para mejorar la navegación interior de un robot modelando patrones de cambios ambientales dinámicos y explotando esta información para planificar las rutas del robot. Usando su enfoque, así, un robot encuentra menos obstáculos y pasajes bloqueados a lo largo de su camino hacia una ubicación determinada.
"La principal ventaja de nuestro enfoque es que considera una representación del entorno que es capaz de integrar continuamente nuevas observaciones sobre el medio ambiente, "Esta representación permite planificar mejores trayectorias a lo largo del tiempo que los codiciosos planificadores de caminos más cortos basados en mapas geométricos estáticos del entorno", explicó Nardi.
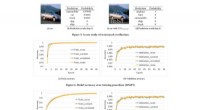
Los investigadores evaluaron su enfoque aplicándolo a una serie de escenarios en cuatro ambientes interiores diferentes:una pequeña oficina, una oficina mediana, una oficina grande y un hospital. En estos experimentos, su enfoque funcionó notablemente bien, planificar caminos efectivos que consideren cambios ambientales. Además, compararon su enfoque con técnicas existentes basadas en mapas estáticos y descubrieron que genera rutas más cortas y mejores cuando el robot se despliega durante períodos de tiempo más largos.
"Nuestros hallazgos muestran que, aunque aumenta la complejidad del sistema de navegación, nuestro enfoque lleva al robot a lo largo del tiempo a proporcionar predicciones precisas sobre las configuraciones del entorno y explotar este conocimiento para navegar por caminos más cortos, "Dijo Nardi.
En el futuro, el enfoque propuesto por Nardi y su colega Cyrill Stachniss podría ayudar a mejorar la navegación del robot en entornos interiores que cambian rápidamente. Podría resultar particularmente útil en entornos donde la eficiencia de un robot es crítica, como hospitales. Los investigadores ahora planean probar su enfoque utilizando una plataforma robótica real, ya que, en última instancia, esto les permitirá evaluar si los hallazgos iniciales que recopilaron aún se mantienen en entornos de la vida real.
"Otra dirección interesante para la investigación futura podría ser intentar integrar comportamientos dinámicos de alta frecuencia, como otros agentes dinámicos en movimiento, en el marco, "Dijo Nardi.
© 2019 Science X Network