Diseño conceptual de fly-robots. Crédito:P. Ramdya, EPFL
"Piensa en lo que puede hacer una mosca, "dice el profesor Pavan Ramdya, cuyo laboratorio en el Brain Mind Institute de EPFL, con el laboratorio del profesor Pascal Fua en el Instituto de Ciencias de la Computación de la EPFL, dirigió el estudio. "Una mosca puede trepar por un terreno que un robot con ruedas no podría".
Las moscas no son precisamente atractivas para los humanos. Los asociamos con razón con experiencias poco apetitosas en nuestra vida diaria. Pero hay un camino inesperado hacia la redención:los robots. Resulta que las moscas tienen algunas características y habilidades que pueden informar un nuevo diseño para sistemas robóticos.
"A diferencia de la mayoría de los vertebrados, las moscas pueden escalar casi cualquier terreno, ", dice Ramdya." Pueden adherirse a paredes y techos porque tienen almohadillas adhesivas y garras en las puntas de las piernas. Esto les permite básicamente ir a cualquier parte. Eso es interesante también porque si puedes descansar en cualquier superficie, puede gestionar su gasto energético esperando el momento adecuado para actuar ".
Fue esta visión de extraer los principios que gobiernan el comportamiento de las moscas para informar el diseño de robots lo que impulsó el desarrollo de DeepFly3D, un sistema de captura de movimiento para la mosca Drosophila melanogaster, un organismo modelo que se utiliza casi en todas partes en la biología.
En la configuración experimental de Ramdya, una mosca camina sobre una pequeña bola flotante, como una cinta de correr en miniatura, mientras siete cámaras registran cada uno de sus movimientos. La parte superior de la mosca está pegada a un escenario inamovible para que siempre permanezca en su lugar mientras camina sobre la pelota. Sin embargo, la mosca "cree" que se mueve libremente.
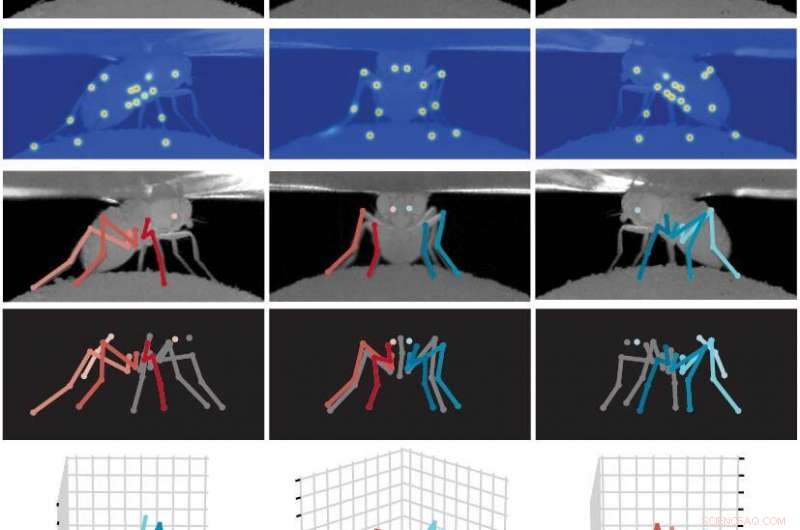
Varias cámaras capturan diferentes poses de la mosca de la fruta Drosophila melanogaster y las procesan con el software DeepFly3D. Crédito:P. Ramdya, EPFL
Las imágenes de la cámara recopiladas son luego procesadas por DeepFly3D, un software de aprendizaje profundo desarrollado por Semih Günel, un doctorado estudiante que trabaja con los laboratorios de Ramdya y Fua. "Este es un buen ejemplo de donde una colaboración interdisciplinaria era necesaria y transformadora, ", dice Ramdya." Al aprovechar las ciencias de la computación y la neurociencia, hemos abordado un desafío de larga data ".
Lo especial de DeepFly3D es que puede inferir la pose tridimensional de la mosca, o incluso de otros animales, lo que significa que puede predecir y realizar mediciones de comportamiento automáticamente con una resolución sin precedentes para una variedad de aplicaciones biológicas. El software no necesita ser calibrado manualmente y utiliza imágenes de la cámara para detectar y corregir automáticamente cualquier error que cometa en sus cálculos de la pose de la mosca. Finalmente, también utiliza el aprendizaje activo para mejorar su propio desempeño.
DeepFly3D abre una forma de modelar los movimientos de manera eficiente y precisa, poses y ángulos articulares de una mosca de la fruta en tres dimensiones. Esto también puede inspirar una forma estándar de modelar automáticamente la pose tridimensional en otros organismos.
"La mosca, como organismo modelo, equilibra muy bien la trazabilidad y la complejidad, "dice Ramdya." Si aprendemos cómo hace lo que hace, podemos tener un impacto importante en la robótica y la medicina y, quizás lo más importante, podemos obtener estos conocimientos en un período de tiempo relativamente corto ".