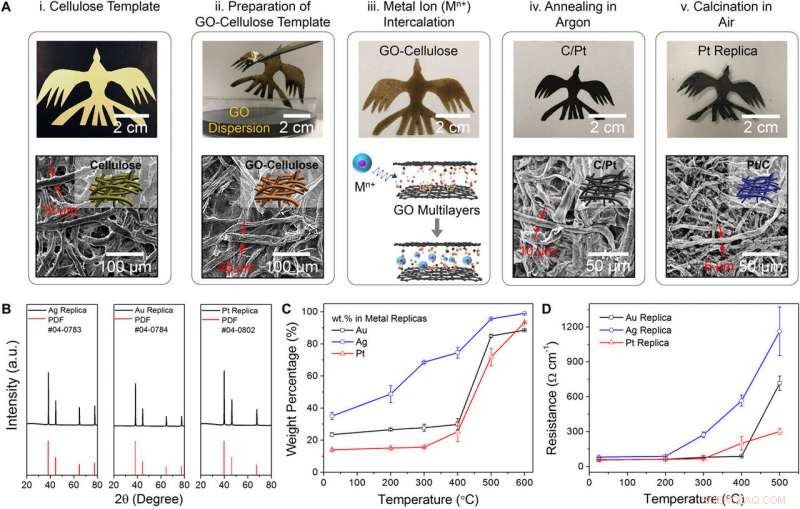
Síntesis de plantillas habilitada para GO de réplicas de metales nobles. (A) La síntesis de plantillas habilitada para GO para transformar el papel de celulosa en réplicas de metales nobles. Se demuestra la síntesis de una réplica de Pt con forma de fénix. Las imágenes SEM mostraron que las morfologías de red del papel de celulosa y la plantilla de GO-celulosa eran muy similares. El diámetro de las microfibras disminuyó de ~ 20 a ~ 6 μm después de un recocido / calcinación en dos etapas. (B) Espectros XRD (difracción de rayos X) de réplicas de metales sintetizados después de recocido / calcinación en dos etapas. Los espectros eran consistentes con sus correspondientes "archivos de difracción de polvo (PDF)" del "comité conjunto sobre estándares de difracción de polvo". (C) Porcentajes en peso de contenido metálico en las réplicas de la plantilla después de la calcinación en aire a diferentes temperaturas. Los porcentajes en peso se determinan mediante análisis EDS (espectroscopía de rayos X de dispersión de energía). (D) Resistencia de réplicas de metal con plantilla (a lo largo de 1 cm) después de la calcinación en aire a diferentes temperaturas. Las barras de error indican las diferencias en las mediciones de cuatro muestras. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Los robots de origami se pueden formar integrando estrechamente múltiples funciones de actuación, detección y comunicación. Pero la tarea es desafiante ya que los materiales convencionales, incluidos los plásticos y el papel utilizados para tales diseños robóticos, imponen restricciones para limitar las funcionalidades adicionales. Para instalar multifuncionalidades en el sistema, los científicos generalmente deben incluir componentes electrónicos externos que aumentan el peso del robot. En un estudio reciente ahora publicado en Ciencia Robótica , Haitao Yang y sus colegas de los departamentos interdisciplinarios de Ingeniería Química y Biomolecular, Ingeniería Biomédica e Ingeniería Eléctrica e Informática en los EE. UU. Y Singapur desarrollaron un proceso de síntesis de plantillas habilitado con óxido de grafeno (GO) para producir reconfigurables, backbones metálicos compatibles y multifuncionales. La columna vertebral formó la base de los robots de origami junto con la detección de tensión incorporada y las capacidades de comunicación inalámbrica. Usando el método GO, los investigadores formaron origamis complejos de metales nobles como réplicas estructurales de plantillas de papel.
El equipo de investigación pudo reproducir estructuras de origami de platino estabilizadas con elastómeros delgados para formar columnas vertebrales multifuncionales para crear los nuevos robots de origami. Los nuevos robots eran más deformables, ignífugos y energéticamente eficientes que los construidos con otros materiales. Yang y col. observó capacidades adicionales para los nuevos robots de platino (robots Pt), incluido el calentamiento resistivo a pedido, Detección de tensión y antenas integradas sin electrónica externa. Para capacidades adicionales, incluyeron monitorear o registrar el movimiento robótico en tiempo real, comunicación inalámbrica entre robots, regulación de calor y control magnético. El nuevo trabajo enriqueció la biblioteca de materiales de robótica para diseñar robots blandos versátiles.
Los investigadores en robótica habían explorado previamente el antiguo arte japonés del origami para diseñar músculos artificiales, Máquinas de plegado automático, sistemas de origami de primavera y metamorfosis robótica. Convencionalmente usaron papel de celulosa, poliéster, poliéter éter cetona y politetrafluoroetileno para fabricar cadenas principales para tales invenciones. A pesar del soporte mecánico que se ofrece, las columnas vertebrales de papel o plástico carecían de funcionalidades de respuesta a los estímulos, detección y comunicación inalámbrica. En lugar de instalar equipos externos para ofrecer tales funcionalidades, Los equipos de investigación ahora apuntan a desarrollar backbones robóticos blandos multifuncionales para una integración estrecha. Los esfuerzos de investigación aún no han demostrado tales prototipos de robots blandos con columna vertebral conductora de origami con potencial de detección y comunicación. Como resultado, Los científicos están interesados en desarrollar un nuevo esquema de fabricación para producir mecánicamente estables, backbones robóticos suaves y conductores.
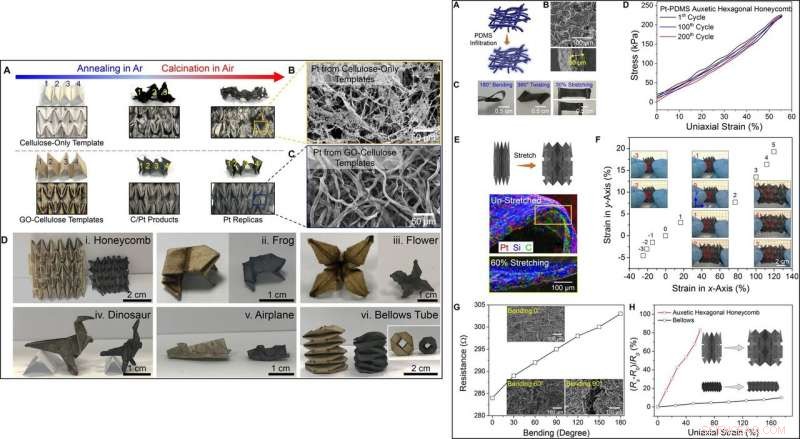
IZQUIERDA:Fabricación de estructuras metálicas de origami. (A) Fotos de los productos de origami de metal hexagonal cuádruple y auxético sintetizados a partir de plantillas de celulosa solo (fila superior) y de celulosa GO (fila inferior). Se muestran productos a base de Pt en diferentes etapas de recocido / calcinación. Imágenes SEM de productos de Pt sintetizados a partir de plantillas de (B) celulosa solo y (C) GO-celulosa. (D) Fotos de origami de celulosa GO y réplicas de origami Pt de tamaño reducido según la plantilla, incluyendo (i) panal, (ii) rana, (iii) flor, (iv) dinosaurio, (v) avión, y (vi) tubo de fuelle. DERECHA:Conversión de réplicas de origami de Pt en metamateriales de elastómero de Pt deformables. (A) La infiltración de elastómero líquido diluido en réplicas de Pt con plantilla permite la fabricación de metamateriales de Pt-elastómero. (B) Imágenes SEM de arriba hacia abajo y en sección transversal del compuesto de elastómero de Pt. El espesor del compuesto de elastómero de Pt es de aproximadamente 90 µm. (C) Gran deformabilidad de una película delgada plana de elastómero de Pt (flexión de 180 °, Torsión de 360 °, y 30% de estiramiento). (D) Curvas de tensión-deformación de un origami hexagonal auxético de elastómero de Pt durante la prueba de estabilidad durante 200 ciclos. (E) Imágenes SEM in situ con mapeo EDS de un pliegue de elastómero de Pt con un estiramiento uniaxial del 90%. (F) Los patrones del origami hexagonal auxético de elastómero de Pt dependen de la tensión durante los procesos de compresión uniaxial (marcados con -1 a -3) y estiramiento (marcados con 1 a 5). La cifra marcada con 0 representa el estado inicial. (G) Cambios de resistencia de una película plana de elastómero de Pt bajo flexión de 0 ° a 180 °. (H) Cambios de resistencia relativa de origamis auxético hexagonal y fuelle Pt-elastómero bajo diversas deformaciones uniaxiales. Rs es la resistencia del origami de elastómero de Pt bajo deformaciones uniaxiales; R0 es la resistencia del origami de elastómero de Pt no tensado. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Durante el proceso de fabricación, Yang y col. utilizó multicapas de óxido de grafeno (GO) para intercalar una variedad de precursores de iones metálicos, seguido de recocido y calcinación a alta temperatura para producir las estructuras GO de alta dimensión. Las réplicas de óxidos metálicos incluían microtexturas, hebras independientes y estructuras de origami complejas con excelente control químico y replicación estructural. El método derivado de GO propuesto proporcionará una nueva plataforma para producir arquitecturas metálicas complejas como backbones multifuncionales para robots blandos.
Yang y col. convirtió las películas de papel de celulosa o las formas de origami en una variedad de réplicas de metal utilizando el proceso de creación de plantillas habilitado para GO. Siguieron cuatro pasos principales durante el proceso de fabricación comenzando con una plantilla en forma de fénix para formar la sal de metal noble (Mn + ) complejos de GO-celulosa intercalados (M-GO-celulosa). Las réplicas de metal resultantes se sometieron a más procesos de recocido y calcinación durante la fabricación y el equipo de investigación las controló ajustando su temperatura de calcinación. Los científicos crearon complejas estructuras metálicas de origami, como panales hexagonales, ranas flores dinosaurios aviones y fuelles mediante la conversión de varias estructuras de origami 3-D de forma de papel de celulosa en metal platino.
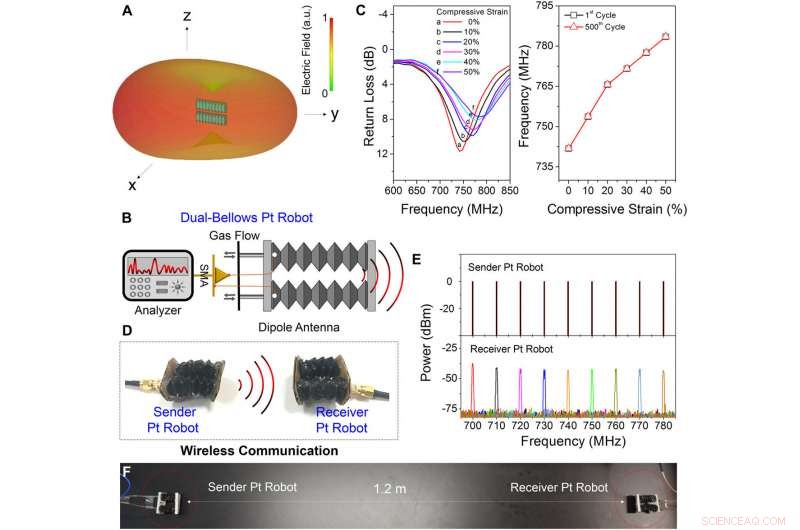
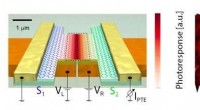
Robot Origami Pt con capacidades de comunicación inalámbrica incorporadas. (A) Patrones de radiación 3D simulados para dos tubos de fuelle de elastómero de Pt a 741,8 MHz con una deformación del 0%. (B) Demostración esquemática de un robot Pt de doble fuelle, que también sirvió como una antena dipolo reconfigurable. (C) Izquierda:Pérdida de retorno de la antena dipolo reconfigurable bajo diferentes tensiones de compresión de 0 a 50%. Derecha:Las frecuencias de resonancia son una función de las tensiones de compresión antes y después de las actuaciones robóticas de 500 ciclos. (D) Fotografía de un robot Pt remitente (enviando señales) (izquierda) y un robot Pt receptor (recibiendo señales) (derecha). (E) Las señales de pulso (enviadas por el robot Pt emisor) fueron bien recibidas por el robot Pt receptor. La frecuencia de las señales enviadas fue idéntica a las señales recibidas. (F) Dos robots Pt pudieron comunicarse de forma remota a una distancia de 1,2 m. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Para mejorar la estabilidad mecánica, incluyeron elastómeros delgados a las estructuras de origami de metal para una gran deformabilidad y reconfiguración reversible. Yang y col. eligió el metal platino debido a su eficiente conservación estructural, alta flexibilidad mecánica y alta conductividad eléctrica en comparación con el oro (Au) o la plata (Ag). El equipo optimizó la columna vertebral de elastómero de Pt para una alta conductividad eléctrica y flexibilidad mecánica, para que el compuesto de elastómero de Pt plano resultante soporte deformaciones grandes y repetidas, ideal para estructuras robóticas blandas. Las redes troncales metálicas reconfigurables introdujeron funcionalidades múltiples y distintas para formar robots de origami metamateriales, incluido el potencial intrínseco de resistencia al fuego. El equipo de investigación probó esta característica al permitir que los robots Pt mantuvieran contacto directo con una llama para una exposición prolongada (800 0 C durante 30 segundos), en comparación, un robot de papel se encendió en segundos (menos de 5 segundos).
La columna vertebral de elastómero de Pt era más delgada y liviana que los robots de papel de celulosa, pero permanecía mecánicamente estable durante la actuación robótica reversible. El robot de papel requería grandes cambios de presión para alargarse o contraerse; mientras que el robot Pt solo requería cambios de presión más bajos. Yang y col. luego desarrolló el robot conductor Pt origami para enviar y recibir ondas electromagnéticas (EM) y servir como una antena reconfigurable para la comunicación inalámbrica. Antes de la fabricación, el equipo de investigación simuló patrones de radiación en 3-D para explorar el uso de robots Pt como antenas radiantes y luego los fabricó. Los científicos también mostraron la comunicación inalámbrica entre dos robots Pt que servían como emisor y receptor. Cuando un robot emisor envió señales de pulso a diferentes frecuencias, el robot receptor estacionado a 1,2 m de distancia los recibió sin desviación de frecuencia entre las señales enviadas y recibidas.
Comparación de la presión del gas entre robots de papel y Pt. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
El equipo comparó cinco categorías de características robóticas en el trabajo para demostrar las ventajas técnicas del uso de las redes troncales metálicas Pt habilitadas para GO en relación con (1) la densidad de la red troncal. (2) rigidez mecánica, (3) eficiencia energética, (4) capacidades de detección de tensión y (5) capacidades de comunicación inalámbrica. El equipo de investigación optimizó aún más los dos robots Pt para la comunicación inalámbrica, donde un robot remitente entregó de forma inalámbrica instrucciones de navegación a un robot receptor para sortear con éxito un obstáculo diseñado siguiendo una ruta guiada.
Luego, el equipo amplió las aplicaciones del sistema mediante la fabricación aditiva en 3-D, donde combinaron tinta de celulosa Pt-Go con modelado por deposición fundida (FDM) para imprimir formas moldeadas de columna vertebral robótica metálica de impresión 3D. Después, diseñaron robots Pt para control remoto con campos magnéticos. Para esto, Yang y col. sintetizó una réplica de Pt con tinta de Pt-Go-celulosa e infiltró la solución de polímero con partículas magnéticas para crear una estructura de Pt magnética. Las nuevas estructuras contenían las capacidades de comunicación inalámbrica y detección de tensión incorporadas habituales, con movimiento magnético añadido. Los robots Pt magnéticos podrían experimentar una forma reversible y una transformación del cuerpo bajo la activación magnética para avanzar en alineación con los campos magnéticos giratorios.
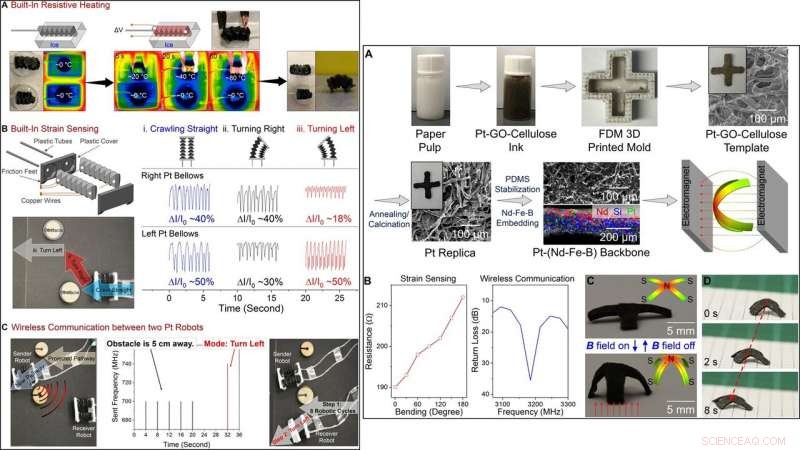
IZQUIERDA:Demostraciones de robots Pt multifuncionales. (A) Robot Pt de fuelle simple con capacidad de calentamiento resistivo incorporada. Se congelaron dos robots Pt en cubitos de hielo. Bajo un voltaje aplicado de 20 V, el robot Pt superior se calentó rápidamente a aprox. 80 ° C en 60 s, escapó del hielo, y siguió arrastrándose hacia adelante. (B) Robot Pt de fuelle doble con capacidad de detección de deformación incorporada. Las redes troncales robóticas de Pt estaban conectadas con cables de cobre, y la conexión se arregló con pasta de plata. La ruta propuesta para el robot Pt de fuelle doble implicaba (i) gatear en línea recta, (ii) girando a la derecha, y (iii) girar a la izquierda. Las actuaciones robóticas a lo largo de toda la vía se controlaron mediante la lectura de los perfiles de corriente de los tubos de fuelle de Pt izquierdo y derecho. (C) Comunicación inalámbrica entre dos robots Pt de fuelle doble. El robot emisor fue bloqueado por un obstáculo en el camino proyectado y giró a la izquierda para sortear el obstáculo. El robot emisor envió una serie de señales al robot receptor. Luego, las señales se interpretaron en la guía móvil para el robot receptor, permitiendo al robot tomar el camino propuesto sin encontrar el obstáculo. DERECHA:Fabricación de un robot Pt accionado magnéticamente mediante tinta de celulosa Pt-GO. (A) Se demostró la fabricación alternativa de robots Pt mediante el desarrollo de tinta de celulosa Pt-GO y la incorporación con la impresión 3D FDM. Después de un recocido / calcinación en dos etapas, Estabilización de PDMS, e incrustación con partículas de Nd-Fe-B, Se fabricó un robot tetrápodo de Pt– (Nd – Fe – B) accionado magnéticamente. (B) Detección de deformación incorporada y capacidades de comunicación inalámbrica del robot tetrápodo Pt– (Nd – Fe – B). (C) Pt– (Nd – Fe – B) robot tetrápodo arqueado hacia arriba y hacia abajo bajo accionamientos magnéticos. (D) Pt– (Nd – Fe – B) robot tetrápodo avanzó siguiendo las trayectorias de campos magnéticos giratorios. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
De este modo, Haitao Yang y sus colegas desarrollaron un protocolo de síntesis de plantillas habilitado para Go para producir reconfigurables, Backbones metálicos multifuncionales y compatibles para construir robots de origami metálicos. Los robots tenían capacidades integradas de detección de tensión y comunicación inalámbrica. La columna vertebral metálica sintética hecha con metales nobles complejos, incluida la plata, el oro y el platino eran altas réplicas estructurales de sus contrapartes de papel. En comparación con los papeles y plásticos tradicionales, las columnas vertebrales reconfigurables de elastómero de Pt ofrecían un peso ligero, deformabilidad y eficiencia energética. Yang y col. imaginar aplicaciones prácticas para robots de origami metálicos que van desde actividades en entornos de alto riesgo, para uso en músculos artificiales y brazos robóticos, y como robots sin ataduras controlados a distancia. Su objetivo es optimizar las cadenas principales metálicas con materiales electroquímicamente activos para formar dispositivos de almacenamiento de energía a continuación. Dichos desarrollos enriquecerán la biblioteca de materiales robóticos para fabricar diversos robots blandos con una integración de alta funcionalidad.
© 2019 Science X Network