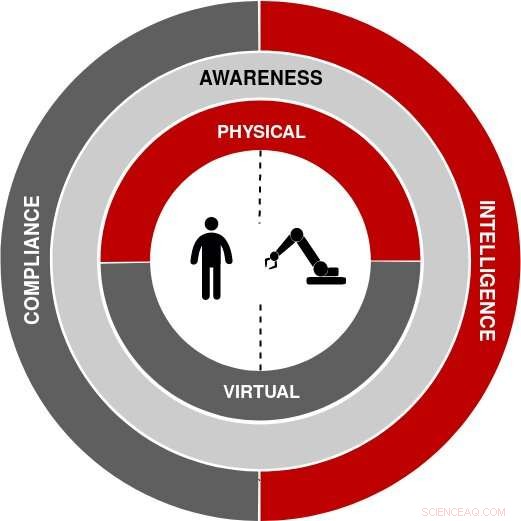
Un diagrama de sistema para el marco conceptual para una Colaboración de Robot Humano como Sistema de Sistemas que resalta los 3 aspectos de un sistema HRC:Conciencia, Inteligencia y cumplimiento. Crédito:Savur, Kumar y Sahin.
Investigadores del Laboratorio de Robótica Colaborativa Century Mold (CMCRL) en el Instituto de Tecnología de Rochester (RIT) en Nueva York han desarrollado recientemente un nuevo marco para monitorear las respuestas fisiológicas humanas mientras los usuarios colaboran con un robot para completar una tarea. Bajo la supervisión del Prof. Ferat Sahin, director del Laboratorio de Bio-Robótica de Agentes Múltiples, Los investigadores de CMCRL están trabajando para desarrollar sistemas, marcos y herramientas de software para estudiar la colaboración humano-robot en un entorno industrial. Su nuevo enfoque, que se describe en un artículo publicado previamente en arXiv y que se presentará en IEEE Systems, Conferencia Man &Cybernetics en Bari (Italia), permite la recopilación continua de datos fisiológicos durante las interacciones humano-robot, mientras cambia los movimientos de un robot para desencadenar una respuesta en el humano con el que está interactuando.
Muchos expertos creen que pronto, humanos y máquinas trabajarán juntos en una variedad de campos, incluyendo industria y manufactura. Para permitir una automatización eficiente y la colaboración humano-robot, sin embargo, Los investigadores deberán desarrollar enfoques que aprovechen las habilidades humanas, como la toma de decisiones, destreza, flexibilidad y creatividad, combinando estos con la velocidad, precisión y potencia asociadas con los robots.
De hecho, mientras que la automatización completa sería muy cara, la fabricación realizada manualmente por humanos solos suele ser lenta y propensa a errores. Por tanto, es importante desarrollar herramientas que mejoren la colaboración humano-robot. Según RIA, esta será una parte central de la Quinta Revolución Industrial, también conocido como Industria 5.0.
"En nuestra opinión, hay tres desafíos principales para la colaboración humano-robot en la industria. Son la seguridad, la confianza humana en la automatización y la productividad, "Shitij Kumar, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Todos ellos dependen unos de otros. Para hacer frente a estos desafíos, Primero desarrollamos una configuración de colaboración humano-robot (HRC) como un sistema de sistemas que nos permitiría crear diferentes escenarios de colaboración humano-robot y comprender y analizar las interacciones humano-robot ".
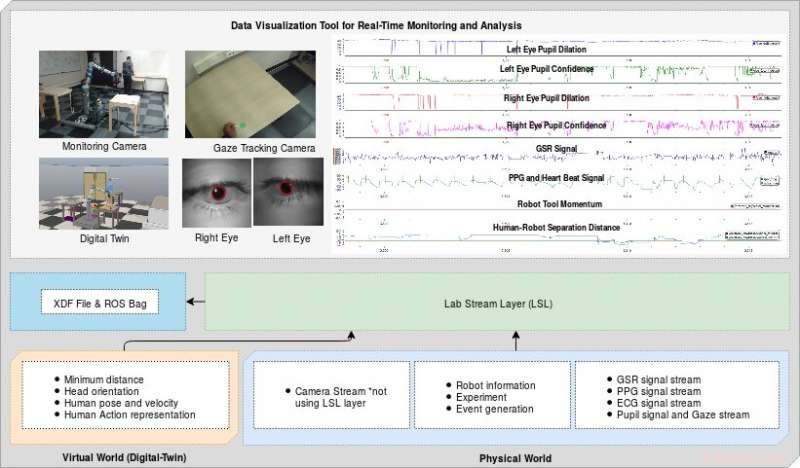
Un diagrama de sistema de la implementación basado en el marco propuesto que representa la recopilación y el seguimiento de datos durante un experimento de HRC. Crédito:Savur, Kumar y Sahin.
Como parte de su doctorado, bajo la dirección del Dr. Ferat Sahin, el director de CMCRL, Kumar comenzó a desarrollar un sistema que cambia el comportamiento del robot en función de la distancia de separación entre humanos y robots y las acciones en el espacio de trabajo compartido. En este contexto, El comportamiento de un robot es determinista y predecible basado en reglas.
A pesar de la promesa mostrada por su enfoque, descubrió que la retroalimentación humana no siempre ocurría, lo que dificultó que su sistema logre un cumplimiento satisfactorio del robot. El cumplimiento del robot significa esencialmente que el robot puede gestionar las expectativas de los seres humanos con los que interactúa y comunicarse de forma eficaz con ellos.
"Creíamos que un mejor cumplimiento del sistema que le da al operador que trabaja con el robot una sensación de control y capacidad de predicción del comportamiento del robot aumentaría su confianza en la automatización". "y de ese modo aumentar la productividad de la tarea, "Dijo Kumar." Sin embargo, luego comenzamos a preguntarnos, ¿Cómo se cuantifica la 'confianza' o el nivel de comodidad de un operador humano que trabaja con el robot? "
Kumar y sus colegas creen que monitorear las señales fisiológicas humanas, que son indicadores de estrés físico y mental, así como otras emociones, durante una tarea que implique la interacción humano-robot sería un paso en la dirección correcta. Esta creencia está respaldada por investigaciones previas que encontraron que tales señales (conocidas como respuestas psicofisiológicas) son indicadores confiables para cambiar el comportamiento y el movimiento del robot.

Sensores y dispositivos utilizados en la implementación del prototipo. Los investigadores utilizaron un sistema de captura de movimiento para monitorear el movimiento humano y una cámara para registrar el experimento. También rastrearon la mirada humana utilizando Pupil Labs y respuestas fisiológicas humanas como la dilatación de la pupila, PPG, GSR, EEG \ y ECG registrados. Crédito:Savur, Kumar y Sahin.
Teniendo esto en cuenta, Celal Savur, un doctorado Estudiante en CMCRL de RIT, llevó a cabo un estudio para explorar los efectos del movimiento y el comportamiento de los robots en las respuestas psicofisiológicas humanas. El objetivo clave de su estudio fue comprender qué cambios en el movimiento de un robot resultan en respuestas de "incomodidad humana" como el miedo o el estrés.
"Para hacer esto, se necesitaba un marco para un sistema que represente y registre el movimiento del robot y el estado fisiológico humano al mismo tiempo, "Savur explicó." Una vez que se identifica la relación entre el movimiento del robot y el estado fisiológico humano, La respuesta fisiológica humana se puede utilizar como retroalimentación para controlar / actualizar directamente el movimiento / comportamiento del robot. Estos sistemas se denominan "sistemas de computación fisiológica". La computación fisiológica es un subconjunto de la computación afectiva que se utiliza a menudo en los juegos de computadora, en el que los juegos se adaptan en tiempo real a las respuestas del jugador, para lograr una experiencia de juego más interactiva ".
En su estudio, Savur y Kumar se propusieron desarrollar un marco que pueda monitorear las respuestas psicofisiológicas humanas a medida que los usuarios completan tareas que involucran la colaboración humano-robot. Su trabajo se encuentra en la intersección entre la informática, robótica y psicofisiología, una rama de la neurociencia que busca comprender cómo el estado mental de una persona y sus respuestas fisiológicas interactúan o se afectan entre sí.
El marco que desarrollaron cae dentro de la categoría de "computación fisiológica". Este es un tipo de computación afectiva que incorpora la adaptación de software en tiempo real a la actividad psicofisiológica del usuario. Esencialmente, El marco que propusieron se puede utilizar para investigar cómo los cambios en el movimiento del robot (por ejemplo, la velocidad y la trayectoria) afectan al operador humano en un entorno industrial.
"Dejenos considerar, por ejemplo, que hay dos operadores trabajando con un robot, operador A y B, ", Explicó Kumar." El operador A ha trabajado más tiempo y se siente cómodo trabajando con el robot, ya que puede predecir el comportamiento del robot a partir de la experiencia. El operador B es nuevo y es un poco escéptico sobre el movimiento del robot. El comportamiento del robot cambia en términos de velocidad a la que se mueve y cuánta distancia mantiene cuando está cerca del operador en función del estado fisiológico y los patrones de comportamiento del operador. En este escenario, para una mejor interacción humano-robot, el robot puede moverse a velocidades más altas trabajando cerca del operador A, y muévase lentamente trabajando con el operador B. A medida que el operador B adquiere más experiencia, el movimiento del robot puede adaptarse a él, generando así confianza y afectando positivamente la productividad general ".
El estudio realizado por los investigadores de CMCRL tenía dos objetivos principales. El primero fue generar una base de datos de tareas de colaboración humano-robot, registrar interacciones humano-robot. Luego querían usar esta base de datos para investigar cómo se pueden usar las respuestas fisiológicas humanas para afectar el movimiento de un robot, impactando positivamente el proceso de automatización. En otras palabras, su objetivo era construir un sistema informático fisiológico para la colaboración humano-robot en entornos industriales y de fabricación.
"Nuestro marco es esencialmente un sistema que representa y registra el movimiento del robot y el estado fisiológico humano al mismo tiempo, "Kumar dijo." Para registrar esta información, el marco proporciona interfaces al robot, sensores como cámaras, sistema de captura de movimiento y también a los dispositivos de adquisición de datos biológicos / biométricos. Como todos estos dispositivos funcionan con diferentes frecuencias de muestreo, este marco ayuda en la adquisición de datos sincrónica y la representación de la colaboración humano-robot ".
En configuraciones experimentales tradicionales de robótica social, A los sujetos humanos se les hacen preguntas sobre sus experiencias y percepciones durante o después de un experimento. Usando sus comentarios, Los investigadores pueden entonces analizar y cuantificar los datos subjetivos recopilados durante el experimento.
"Métodos que interrumpen a los sujetos o hacen que el sujeto recuerde su experiencia, sin embargo, no siempre son capaces de mantener la integridad del experimento o representar con precisión los datos subjetivos, "Kumar explicó." Por lo tanto, a diferencia de los métodos tradicionales, esta implementación del marco permite al sujeto humano o al investigador principal generar marcadores de eventos a medida que se realiza el experimento / tarea de colaboración de robot humano (HRC) ".
Su marco puede generar automáticamente marcadores de eventos basados en la representación humano-robot en un mundo virtual, que se conoce como gemelo digital. Por ejemplo, puede ayudar a identificar cuándo el robot y el humano estaban más cerca el uno del otro durante la tarea, cuando el robot tuvo que detenerse o fue interrumpido por una acción humana, el progreso de la tarea realizada por el ser humano, eventos basados en comandos o control por parte del operador humano, un evento cuando el robot estaba trabajando a máxima velocidad, y el comienzo / final de una tarea.
"Nuestro marco también proporciona una interfaz de usuario para que los investigadores reproduzcan y visualicen sus experimentos de HRC, "Kumar dijo." Además, les permite analizar y etiquetar los datos recopilados. La recopilación continua y sincrónica de datos fisiológicos de varios dispositivos y su interfaz junto con el control y la interfaz del robot en un solo ecosistema, permite una representación completa del estado humano y del robot. Esto puede ayudar a comprender la causa y el efecto entre el estado fisiológico humano y los movimientos del robot ".
Con la llegada de los dispositivos portátiles y la Internet de las cosas (IoT), Los datos fisiológicos humanos serán más fáciles de recopilar y, por lo tanto, estarán fácilmente disponibles. El marco desarrollado por la investigación podría resultar extremadamente valioso, ya que está diseñado para aprovechar estos datos para mejorar las interacciones entre humanos y robots.
"Este marco permite un registro continuo de datos con generación de eventos incorporada y la sincronización de señales en sistemas distribuidos puede mantener la integridad del experimento (recreando el escenario de una tarea en un entorno industrial) y representar con precisión los datos subjetivos, "Dijo Kumar.
Kumar y sus colegas creen que un agente capaz de tal computación fisiológica (es decir, que puede detectar respuestas fisiológicas humanas y responder a ellas) podría resultar en un sistema cerrado de humano en el circuito, donde tanto los usuarios humanos como los robots en una configuración de HRC son monitoreados y la información se comparte entre ellos. Esto podría resultar en una mejor comunicación, que, en última instancia, podría fomentar una mayor confianza en la automatización entre el público, al mismo tiempo que aumenta la productividad. En el futuro, los investigadores planean poner las bases de datos generadas en su estudio a disposición de otros investigadores de HRI.
"Nuestros próximos estudios se centrarán en el desarrollo de una aplicación de interfaz de usuario completa del sistema informático fisiológico para el procesamiento de señales de grabación, extraer información y aplicar un algoritmo de aprendizaje automático para proporcionar retroalimentación al robot, "Dijo Kumar." El objetivo final de este trabajo es generar una base de datos que se pueda utilizar para comprender mejor cómo se puede inferir que las respuestas fisiológicas humanas dan como resultado un comportamiento de movimiento de robot adaptativo ".
© 2019 Science X Network