El sentido del tacto generalmente se mide mediante un sensor que puede traducir una presión sobre él en una pequeña señal eléctrica. Crédito:Shutterstock
Tenemos robots que pueden caminar ver, hablar y escuchar, y manipular objetos en sus manos robóticas. Incluso hay un robot que huele.
Pero, ¿qué pasa con el sentido del tacto? Es más fácil decirlo que hacerlo y existen limitaciones para algunos de los métodos actuales que se están analizando, pero estamos desarrollando una nueva técnica que puede superar algunos de esos problemas.
Para humanos, el tacto juega un papel vital cuando movemos nuestros cuerpos. Tocar, combinado con la vista, es crucial para tareas como levantar objetos, duros o blandos, ligero o pesado, cálidos o fríos, sin dañarlos.
En el campo de la manipulación robótica, en el que una mano de robot o una pinza tiene que recoger un objeto, agregar el sentido del tacto podría eliminar las incertidumbres al tratar con suaves, Objetos frágiles y deformables.
La búsqueda de una piel inteligente
Cuantificar el tacto en términos de ingeniería no solo requiere el conocimiento preciso de la cantidad de fuerza externa aplicada a un sensor táctil, pero también necesitas saber la posición exacta de la fuerza, su ángulo, y cómo interactuará con el objeto manipulado.
Luego está la pregunta sobre cuántos de estos sensores necesitaría un robot. Desarrollar una máscara de robot que pueda contener cientos o incluso miles de sensores táctiles es una tarea de ingeniería desafiante.
Comprender los mecanismos físicos de la detección táctil en el mundo biológico proporciona una gran comprensión cuando se trata de diseñar el equivalente robótico. una piel inteligente.
Pero una barrera importante para el desarrollo de una piel inteligente es la electrónica necesaria.
Medición diaria de fuerza y tacto
El sentido del tacto generalmente se mide mediante un sensor que puede traducir la presión en una pequeña señal eléctrica. Cuando usa una báscula digital para pesarse o medir ingredientes en su cocina, las escalas probablemente utilizan un transductor piezoeléctrico.
Este es un dispositivo que convierte una fuerza en electricidad. La pequeña corriente eléctrica del transductor pasa a través de cables hasta un pequeño microchip que lee la intensidad de la corriente. convierte eso en una medida de peso significativa, y lo muestra en una pantalla.
A pesar de poder sentir diferentes niveles de fuerza, Estos dispositivos electrónicos tienen varias limitaciones que los hacen poco prácticos para la piel inteligente. En particular, tienen un tiempo de respuesta relativamente lento a la fuerza.
Existen otros tipos de sensores táctiles basados en un material que cambia sus otras características eléctricas, como capacitancia o resistencia. La pantalla de su teléfono móvil puede tener esta tecnología incorporada, y si usa un trackpad en su computadora, seguramente usará sensores táctiles.
Detección de fuerza suave y flexible
Ha habido un gran progreso en los últimos años en la fabricación de sensores táctiles que se pueden incrustar en materiales suaves y flexibles. Esto es exactamente lo que necesitamos para una piel inteligente.
Pero muchos de estos desarrollos fallan por completo (debido al tipo de detección) en presencia de humedad. (¿Alguna vez ha probado con un dedo mojado en la pantalla táctil de su teléfono inteligente?)
Las aplicaciones médicas son ahora un impulsor principal detrás de la demanda de detección de fuerza flexible y robusta. Por ejemplo, La piel inteligente podría usarse para restaurar la retroalimentación sensorial en pacientes con daño cutáneo o neuropatía periférica (entumecimiento u hormigueo). También se puede utilizar para dar a las manos protésicas la capacidad básica de detección del tacto.
Recientemente, Investigadores del MIT y Harvard han desarrollado un guante táctil escalable y lo han combinado con inteligencia artificial. Los sensores distribuidos uniformemente sobre la mano se pueden utilizar para identificar objetos individuales, estimar su peso, y explore los patrones táctiles típicos que surgen mientras los capta.
Los investigadores crearon un guante con 548 sensores ensamblados en un tejido de punto que contiene una película piezorresistiva (que también reacciona a la presión o tensión) conectada por una red de electrodos de hilo conductor.
Este es el primer intento exitoso de registrar tales señales a gran escala, revelando información importante que se puede utilizar en el diseño futuro de prótesis y herramientas de agarre robóticas.
Pero al igual que casi todas las demás interfaces táctiles diseñadas con capacitiva, técnicas resistivas o piezoeléctricas, esta tecnología táctil no funciona bien con los dedos mojados o bajo el agua.
Detección de fuerza óptica en el horizonte
Para abordar este problema, Hemos desarrollado una nueva forma de sensor táctil que utiliza películas nanométricas de LED orgánicos (OLED) y fotodiodos orgánicos (OPD) para medir el tacto suave.
La tecnología OLED se encuentra normalmente en televisores y pantallas de teléfonos inteligentes. Nuestro enfoque para medir el sentido del tacto se basa en la detección de fuerza óptica.
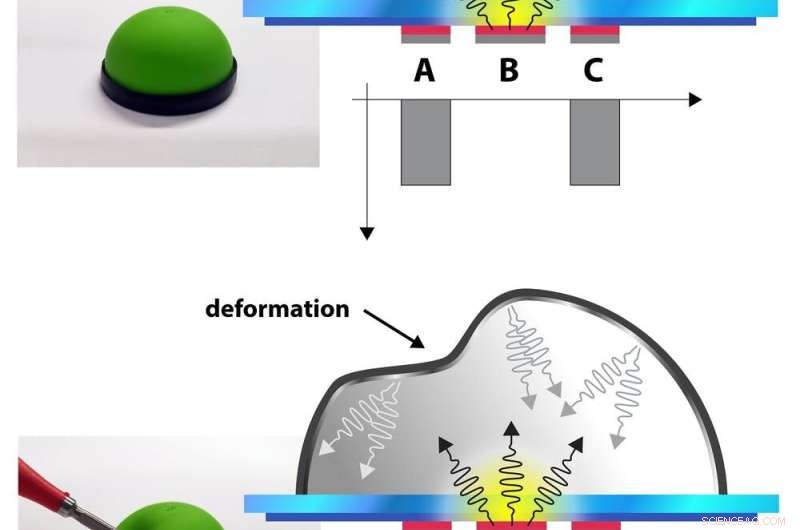
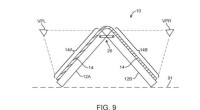
Un solo elemento táctil compuesto por una cúpula sobre algunos píxeles OLED. Cima, cuando nada toca la cúpula, se refleja la misma cantidad de luz del píxel emisor de luz B, a los píxeles de detección de luz A y C. Abajo, cuando algo toca la cúpula, se deforma y la cantidad de luz reflejada cambia entre los píxeles A y C. Crédito:Ajay Pandey, Autor proporcionado
Los elementos OLED (llamados diodos o píxeles) son en realidad completamente reversibles. Esto significa que, además de poder producir luz (como en una pantalla de televisión), estos píxeles también pueden detectar la luz.
Usando este principio podemos fabricar un pequeño, opaco, domo flexible con un revestimiento reflectante que se coloca sobre algunos píxeles OLED. La luz emitida por el píxel central se distribuye uniformemente a través de todos los demás píxeles debajo de la cúpula si la cúpula no se ve afectada.
Pero si se presiona la cúpula, al tocar algo, se deformará, dando como resultado una respuesta desigual de los píxeles que se utilizan para detectar la luz reflejada. Combinando las respuestas de docenas de estos domos en el área de contacto será posible estimar la fuerza que se está aplicando.
Este enfoque es un paso significativo hacia la simplificación del diseño de piel inteligente para aplicaciones de áreas grandes y esperamos que pronto veamos robots que puedan tener detección de cuerpo completo en el aire. cuando está mojado o incluso bajo el agua.
Este artículo se ha vuelto a publicar de The Conversation con una licencia de Creative Commons. Lea el artículo original.