Los robots Tribot tienen cinco estrategias de locomoción. Crédito:Zhenishbek Zhakypov / EPFL
Individualmente, las hormigas solo tienen tanta fuerza e inteligencia, pero como colonia pueden usar estrategias complejas para completar tareas sofisticadas y evadir a los depredadores más grandes.
En EPFL, Los investigadores de robótica del laboratorio del profesor Jamie Paik han reproducido este fenómeno, desarrollar pequeños robots que muestren una inteligencia física mínima a nivel individual, pero que sean capaces de comunicarse y actuar colectivamente. A pesar de tener un diseño simple y un peso de solo 10 gramos, cada robot tiene múltiples modos de locomoción para navegar por cualquier tipo de superficie. Colectivamente, pueden detectar y superar rápidamente obstáculos y mover objetos mucho más grandes y pesados que ellos mismos. La investigación relacionada se ha publicado en Naturaleza .
Robots inspirados en las hormigas de mandíbula trampa
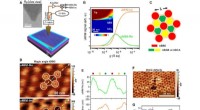
Estos de tres patas, Los robots de origami en forma de T se llaman Tribots. Se pueden ensamblar en solo unos minutos doblando una pila de hojas multimaterial, haciéndolos adecuados para la producción en masa. Completamente autónomo y sin ataduras, Los Tribots están equipados con sensores de proximidad e infrarrojos para fines de detección y comunicación. Podrían acomodar aún más sensores dependiendo de la aplicación.
"Sus movimientos se basan en los de las hormigas Odontomachus. Estos insectos normalmente se arrastran, pero para escapar de un depredador, juntan sus poderosas mandíbulas para saltar de hoja en hoja, "dice Zhenishbek Zhakypov, el primer autor. Los Tribots replican este mecanismo de catapulta a través de un elegante diseño de origami que combina múltiples actuadores de aleación con memoria de forma. Como resultado, un solo robot puede producir cinco movimientos de locomoción distintos:salto vertical, salto horizontal, dar volteretas para despejar obstáculos, caminar sobre terreno texturizado y gatear sobre superficies planas, como estas hormigas creativamente resilientes.
Roles:Líder, trabajador y explorador
A pesar de tener la misma anatomía, a cada robot se le asigna un rol específico en función de la situación. Los 'exploradores' detectan obstáculos físicos en su camino, como objetos, valles y montañas. Después de detectar un obstáculo, informan al resto del grupo. Luego, el 'líder' da las instrucciones. Los trabajadores, ' mientras tanto, aunar su fuerza para mover objetos. "Cada Tribot, como las hormigas Odontomachus, puede tener diferentes roles. Sin embargo, también pueden asumir nuevos roles instantáneamente cuando se enfrentan a una nueva misión o un entorno desconocido, o incluso cuando otros miembros se pierden. Esto va más allá de lo que pueden hacer las hormigas reales, "dice Paik.
Zhenishbek Zhakypov y Jamie Paik en el laboratorio, sosteniendo algunos tribots. Crédito:Marc Delachaux / EPFL
Aplicaciones futuras
En situaciones prácticas, como una misión de búsqueda de emergencia, Los tribots podrían desplegarse en masa. Y gracias a sus capacidades de comunicación multi-locomotora y multi-agente, podían localizar un objetivo rápidamente sobre una gran superficie sin depender del GPS o de la información visual. "Dado que se pueden fabricar e implementar en grandes cantidades, tener algunas 'bajas' no afectaría el éxito de la misión, "agrega Paik."
"Con su inteligencia colectiva única, nuestros diminutos robots pueden demostrar una mejor adaptabilidad a entornos desconocidos; por lo tanto, para determinadas misiones, superarían a los más grandes, robots más poderosos ".