El resultado de esta investigación muestra que los humanos pueden enseñar intuitivamente a los robots a ser flexibles, ya que no se logró mediante el cálculo numérico o la programación de los movimientos del robot. Crédito:Instituto de Ciencia y Tecnología de Corea (KIST)
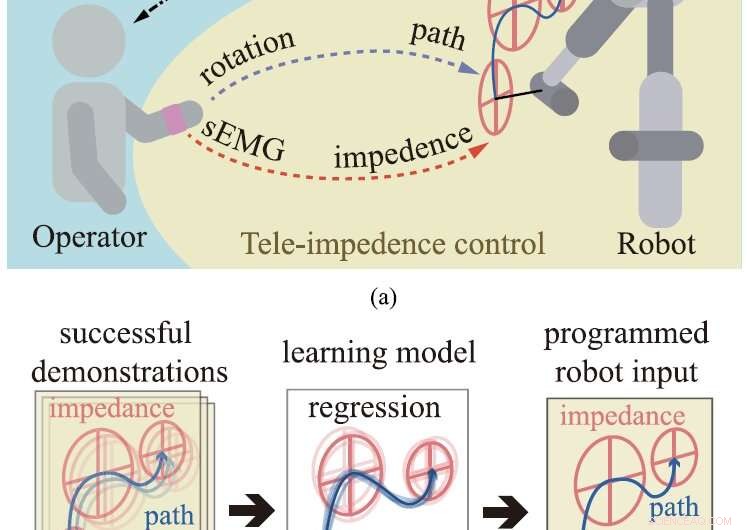
El equipo del Dr. Kee-hoon Kim en el Centro de Robótica Inteligente e Interactiva del Instituto de Ciencia y Tecnología de Corea (KIST) desarrolló una forma de enseñar "robots controlados por impedancia" a través de demostraciones humanas utilizando electromiogramas de superficie (sEMG) de músculos, y logró enseñarle a un robot a atrapar un balón a tierra como un jugador de fútbol. Un electromiograma de superficie es una señal eléctrica producida durante la activación muscular que se puede captar en la superficie de la piel.
Los robots controlados por impedancia desarrollados recientemente han abierto una nueva era de robótica basada en la elasticidad natural de los músculos y las articulaciones humanas. de los que carecen los robots rígidos convencionales. Se espera que los robots con articulaciones flexibles puedan funcionar, saltar obstáculos y practicar deportes como los humanos. Sin embargo, la tecnología necesaria para enseñar a estos robots a moverse de esta manera no ha estado disponible hasta hace poco.
El equipo de investigación de KIST se convirtió en el primero en el mundo en desarrollar una forma de enseñar nuevos movimientos a robots controlados por impedancia utilizando señales de músculos humanos. Con esta tecnología, que detecta no solo los movimientos humanos sino también las contracciones musculares a través de sEMG, Ahora los robots pueden imitar movimientos basados en demostraciones humanas.
El equipo del Dr. Kee-hoon Kim ha logrado usar sEMG para enseñar a un robot a atrapar rápida y hábilmente una pelota que cae rápidamente antes de que entre en contacto con una superficie sólida o rebote demasiado para alcanzarla, similar a las habilidades empleadas por los jugadores de fútbol.
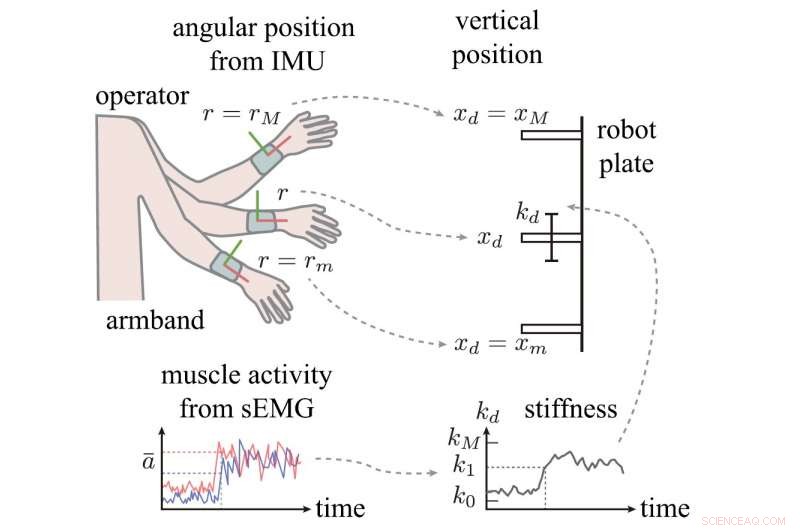
Los sensores SEMG estaban conectados al brazo de un hombre, permitiéndole controlar simultáneamente la ubicación y la flexibilidad de los rápidos movimientos ascendentes y descendentes del robot. Crédito:Instituto de Ciencia y Tecnología de Corea (KIST)
Los sensores SEMG estaban conectados al brazo de un hombre, permitiéndole controlar simultáneamente la ubicación y la flexibilidad de los rápidos movimientos ascendentes y descendentes del robot. Luego, el hombre "enseñó" al robot cómo atrapar una bola que cae rápidamente mediante una demostración personal. Después de aprender el movimiento, el robot fue capaz de atrapar hábilmente un balón a tierra sin ninguna ayuda externa.
Este resultado de la investigación, lo que demuestra que los humanos pueden enseñar intuitivamente a los robots a ser flexibles, ha llamado mucho la atención, ya que no se logró mediante el cálculo numérico o la programación de los movimientos del robot. Se espera que este estudio ayude a avanzar en el estudio de las interacciones entre humanos y robots, acercándonos un paso más a un mundo en el que los robots son una parte integral de nuestra vida diaria.
Kim dijo, "El resultado de esta investigación, que se centra en enseñar habilidades humanas a los robots, es un logro importante en el estudio de las interacciones entre humanos y robots ".
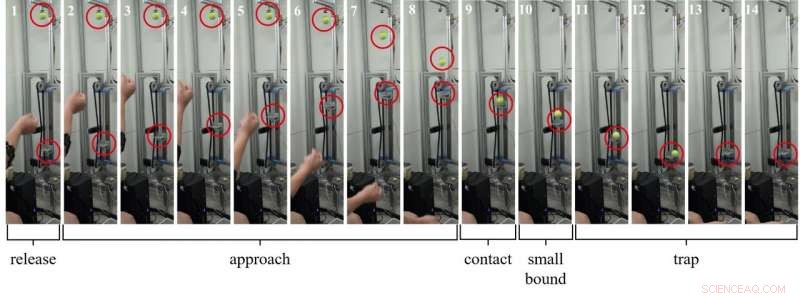
Demostración de un robot para atrapar pelota sin codificación. Crédito:Instituto de Ciencia y Tecnología de Corea (KIST)