Usando su cola ondulada y una habilidad única para controlar su propia flotabilidad, SoFi puede nadar en línea recta, girar, o bucear hacia arriba o hacia abajo. Crédito:MIT CSAIL
Este mes, los científicos publicaron imágenes poco comunes de uno de los tiburones más esquivos del Ártico. Los hallazgos demuestran que, incluso con muchos avances tecnológicos en los últimos años, Sigue siendo una tarea desafiante documentar de cerca la vida marina.
Pero los informáticos del MIT creen que tienen una posible solución:usar robots.
En un periódico publicado hoy un equipo del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT presentó "SoFi, "un pez robótico blando que puede nadar de forma independiente junto a peces reales en el océano.
Durante las inmersiones de prueba en el Rainbow Reef en Fiji, SoFi nadó a profundidades de más de 50 pies durante hasta 40 minutos a la vez, manejando ágilmente las corrientes y tomando fotos y videos de alta resolución usando (¿qué más?) una lente de ojo de pez.
Usando su cola ondulada y una habilidad única para controlar su propia flotabilidad, SoFi puede nadar en línea recta, girar, o bucear hacia arriba o hacia abajo. El equipo también usó un controlador Super Nintendo impermeable y desarrolló un sistema de comunicaciones acústicas personalizado que les permitió cambiar la velocidad de SoFi y hacer que realizara movimientos y giros específicos.
"Hasta donde sabemos, este es el primer pez robótico que puede nadar sin ataduras en tres dimensiones durante largos períodos de tiempo, "dice el candidato al doctorado de CSAIL, Robert Katzschmann, autor principal del nuevo artículo de revista publicado hoy en Ciencia Robótica . "Estamos entusiasmados con la posibilidad de poder utilizar un sistema como este para acercarnos más a la vida marina de lo que los humanos pueden obtener por sí mismos".
Katzschmann trabajó en el proyecto y escribió el artículo con la directora de CSAIL, Daniela Rus, el estudiante graduado Joseph DelPreto y el ex postdoctorado Robert MacCurdy, quien ahora es profesor asistente en la Universidad de Colorado en Boulder.
Cómo funciona
Los vehículos submarinos autónomos (AUV) existentes tradicionalmente han estado atados a barcos o propulsados por hélices voluminosas y costosas.
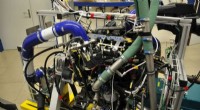
A diferencia de, SoFi tiene una configuración mucho más simple y liviana, con una sola cámara, un motor, y la misma batería de polímero de litio que se encuentra en los teléfonos inteligentes de consumo. Para hacer nadar al robot, el motor bombea agua a dos cámaras en forma de globo en la cola del pez que funcionan como un conjunto de pistones en un motor. A medida que una cámara se expande, se dobla y flexiona hacia un lado; cuando los actuadores empujan agua hacia el otro canal, que uno se dobla y se flexiona en la otra dirección.
Estas acciones alternas crean un movimiento de lado a lado que imita el movimiento de un pez real. Al cambiar sus patrones de flujo, el sistema hidráulico permite diferentes maniobras de cola que dan como resultado un rango de velocidades de nado, con una velocidad media de aproximadamente la mitad de la longitud del cuerpo por segundo.

El equipo usó un controlador de Super Nintendo a prueba de agua para cambiar la velocidad de SoFi y hacer que realizara movimientos y giros específicos. Crédito:Instituto de Tecnología de Massachusetts
"Los autores muestran una serie de logros técnicos en la fabricación, poder y resistencia al agua que permiten que el robot se mueva bajo el agua sin ataduras, "dice Cecilia Laschi, profesor de biorrobótica en la Escuela de Estudios Avanzados Sant'Anna de Pisa, Italia. "Un robot como este puede ayudar a explorar el arrecife más de cerca que los robots actuales, tanto porque puede acercarse de manera más segura al arrecife como porque puede ser mejor aceptado por las especies marinas ".
Toda la mitad trasera del pescado está hecha de caucho de silicona y plástico flexible, y varios componentes están impresos en 3D, incluyendo la cabeza, que contiene toda la electrónica. Para reducir la posibilidad de que entre agua en la maquinaria, el equipo llenó la cabeza con una pequeña cantidad de aceite de bebé, ya que es un fluido que no se comprime por los cambios de presión durante las inmersiones.
En efecto, Uno de los mayores desafíos del equipo fue lograr que SoFi nadara a diferentes profundidades. El robot tiene dos aletas en su costado que ajustan la inclinación del pez para bucear hacia arriba y hacia abajo. Para ajustar su posición verticalmente, el robot tiene un compartimento de peso ajustable y una "unidad de control de flotabilidad" que puede cambiar su densidad comprimiendo y descomprimiendo aire.
Katzschmann dice que el equipo desarrolló SoFi con el objetivo de ser lo más no disruptivo posible en su entorno. desde el mínimo ruido del motor hasta las emisiones ultrasónicas del sistema de comunicaciones del equipo, que envía comandos usando longitudes de onda de 30 a 36 kilohercios.
"El robot es capaz de realizar observaciones e interacciones cercanas con la vida marina y parece no molestar a los peces reales, "dice Rus.

La configuración liviana de SoFi incluye una sola cámara, un motor, y la misma batería de polímero de litio que se puede encontrar en los teléfonos inteligentes de consumo. Crédito:Instituto de Tecnología de Massachusetts
El proyecto es parte de un cuerpo de trabajo más amplio en CSAIL centrado en robots blandos, que tienen el potencial de ser más seguros, más robusto y más ágiles que sus homólogos de cuerpo duro. Los robots blandos son, en muchos sentidos, más fáciles de controlar que los robots rígidos, ya que los investigadores no tienen que preocuparse tanto por tener que evitar colisiones.
"La evitación de colisiones a menudo conduce a un movimiento ineficaz, dado que el robot tiene que conformarse con una trayectoria libre de colisiones, "dice Rus, el profesor Andrew y Erna Viterbi de Ingeniería Eléctrica y Ciencias de la Computación en el MIT. "A diferencia de, un robot blando no solo tiene más probabilidades de sobrevivir a una colisión, pero podría usarlo como información para informar un plan de movimiento más eficiente la próxima vez ".
Como próximos pasos, el equipo trabajará en varias mejoras en SoFi. Katzschmann planea aumentar la velocidad del pez mejorando el sistema de bombeo y ajustando el diseño de su cuerpo y cola.
Él dice que también planean usar pronto la cámara a bordo para permitir que SoFi siga automáticamente peces reales. y construir SoFis adicionales para que los biólogos estudien cómo responden los peces a los diferentes cambios en su entorno.
"Vemos a SoFi como un primer paso hacia el desarrollo de casi una especie de observatorio submarino, ", dice Rus." Tiene el potencial de ser un nuevo tipo de herramienta para la exploración del océano y abrir nuevas vías para descubrir los misterios de la vida marina ".
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.