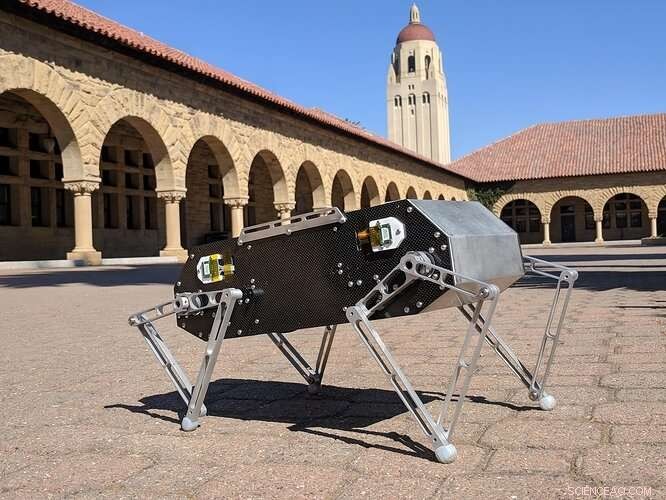
Proyecto Stanford Doggo:un robot cuadrúpedo impulsado por ODrive
Dando su propio toque a los robots que deambulan por paisajes complicados, El equipo de Movilidad Extrema del club de Robótica Estudiantil de Stanford ha desarrollado un robot de cuatro patas que no solo es capaz de realizar trucos acrobáticos y atravesar terrenos desafiantes, sino que también está diseñado teniendo en cuenta la reproducibilidad. Cualquiera que quiera su propia versión del robot, apodado Stanford Doggo, puede consultar planes integrales, código y una lista de materiales que los estudiantes han puesto a disposición gratuitamente en línea.
"Habíamos visto estos otros robots cuadrúpedos utilizados en la investigación, pero no eran algo que pudieras llevar a tu propio laboratorio y usar para tus propios proyectos, "dijo Nathan Kau, '20, una especialización en ingeniería mecánica y líder en Movilidad Extrema. "Queríamos que Stanford Doggo fuera este robot de código abierto que pudieras construir tú mismo con un presupuesto relativamente pequeño".
Mientras que otros robots similares pueden costar decenas o cientos de miles de dólares y requieren piezas personalizadas, los estudiantes de Extreme Mobility estiman el costo de Stanford Doggo en menos de $ 3, 000, incluidos los costos de fabricación y envío, y casi todos los componentes se pueden comprar en línea tal cual están. Esperan que la accesibilidad de estos recursos inspire a una comunidad de creadores e investigadores de Stanford Doggo que desarrollen productos derivados innovadores y significativos de su trabajo.
Stanford Doggo ya puede caminar, trote, danza, brincar, saltar y realizar la voltereta hacia atrás ocasional. Los estudiantes están trabajando en una versión más grande de su creación, que actualmente es del tamaño de un beagle, pero se tomarán un breve descanso para presentar Stanford Doggo en la Conferencia Internacional sobre Robótica y Automatización el 21 de mayo en Montreal. Canadá.
Un salto un salto y una voltereta hacia atrás
Para hacer que Stanford Doggo sea replicable, los estudiantes lo construyeron desde cero. Esto significó pasar mucho tiempo investigando suministros fácilmente alcanzables y probando cada pieza a medida que la fabricaban. sin depender de simulaciones.
"Han pasado aproximadamente dos años desde que tuvimos la primera idea de hacer un cuadrúpedo. Definitivamente hicimos varios prototipos antes de comenzar a trabajar en esta iteración del perro, "dijo Natalie Ferrante, '19, un estudiante coterminal de ingeniería mecánica y miembro del Equipo de Movilidad Extrema. "Fue muy emocionante la primera vez que lo hicimos caminar".
Los primeros pasos de Stanford Doggo fueron, sin duda, pequeños, pero ahora el robot puede mantener un paso constante y la trayectoria deseada, incluso cuando se encuentra con diferentes terrenos. Lo hace con la ayuda de motores que detectan fuerzas externas en el robot y determinan cuánta fuerza y torque debe aplicar cada pierna en respuesta. Estos motores vuelven a calcular a 8, 000 veces por segundo y son esenciales para el baile característico del robot:un boogie hinchable que oculta el hecho de que no tiene resortes. En lugar de, los motores actúan como un sistema de resortes virtuales, rebotando suavemente pero alegremente al robot en la forma adecuada cada vez que sienten que está fuera de posición.
Entre las habilidades y trucos que el equipo agregó al repertorio del robot, los estudiantes estaban excepcionalmente sorprendidos por su habilidad para saltar. Ejecutando Stanford Doggo a través de sus pasos una (muy) mañana temprano en el laboratorio, el equipo se dio cuenta de que se elevaba sin esfuerzo 2 pies en el aire. Al superar los límites del software del robot, Stanford Doggo pudo saltar 3, luego a 3½ pies del suelo.
"Fue entonces cuando nos dimos cuenta de que el robot era, en ciertos sentidos, mayor rendimiento que otros robots cuadrúpedos utilizados en la investigación, a pesar de que era de muy bajo costo, "recordó Kau.
Desde entonces, los estudiantes han enseñado a Stanford Doggo a hacer una voltereta hacia atrás, pero siempre con relleno para permitir una rápida experimentación de prueba y error.
¿Qué hará ahora Stanford Doggo?
Si estos estudiantes se salen con la suya, el futuro de Stanford Doggo en manos de las masas.
"Esperamos ofrecer un sistema de referencia que cualquiera pueda construir, "dijo Patrick Slade, estudiante de posgrado en aeronáutica y astronáutica y mentor de Movilidad Extrema. "Decir, por ejemplo, querías trabajar en búsqueda y rescate; podría equiparlo con sensores y escribir un código encima del nuestro que le permitiría trepar por montones de rocas o excavar a través de cuevas. O tal vez sea coger cosas con un brazo o llevar un paquete ".
Eso no quiere decir que no continúen con su propio trabajo. Extreme Mobility está colaborando con el Laboratorio de Exploración Robótica de Zachary Manchester, profesor asistente de aeronáutica y astronáutica, para probar nuevos sistemas de control en un segundo Stanford Doggo. El equipo también ha terminado de construir un robot del doble del tamaño de Stanford Doggo que puede transportar alrededor de 6 kilogramos de equipo. Su nombre es Stanford Woofer.














