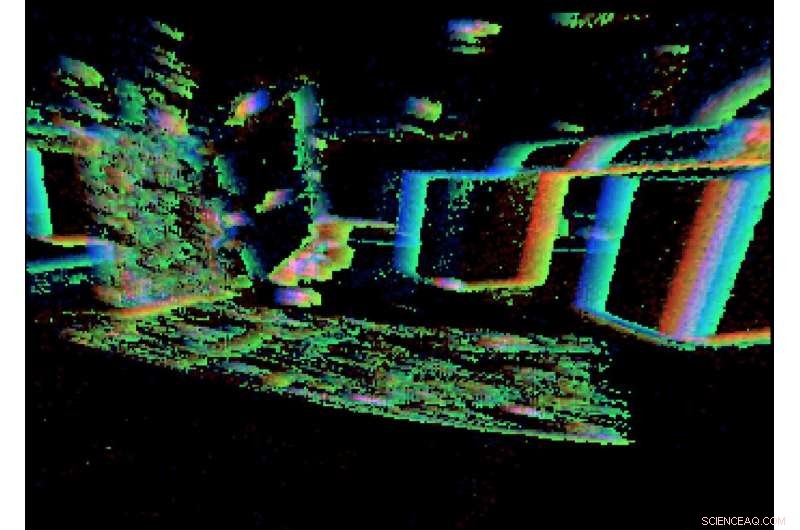
El laboratorio de investigadores, como lo ve el sensor de visión dinámica. Crédito:Grupo de Percepción y Robótica, Universidad de Maryland.
José Altuve, de los Astros de Houston, sube al plato con un conteo de 3-2, estudia al lanzador y la situación, obtiene el visto bueno desde la tercera base, rastrea el lanzamiento de la pelota, columpios ... y consigue un sencillo en el medio. Solo otro viaje al plato para el tres veces campeón de bateo de la Liga Americana.
¿Podría un robot recibir un golpe en la misma situación? No es probable.
Altuve ha perfeccionado los reflejos naturales, años de experiencia, conocimiento de las tendencias del lanzador, y comprensión de las trayectorias de varios tonos. Lo que ve oye y siente que se combina a la perfección con su memoria cerebral y muscular para sincronizar el swing que produce el golpe. El robot, por otra parte, necesita usar un sistema de enlace para coordinar lentamente los datos de sus sensores con las capacidades de su motor. Y no puede recordar nada. ¡Huelga tres!
Pero puede haber esperanza para el robot. Un artículo de investigadores de la Universidad de Maryland recién publicado en la revista Ciencia Robótica introduce una nueva forma de combinar la percepción y los comandos motores utilizando la llamada teoría de la computación hiperdimensional, lo que podría alterar y mejorar fundamentalmente la tarea básica de la inteligencia artificial (IA) de representación sensoriomotora:cómo los agentes como los robots traducen lo que sienten en lo que hacen.
"Aprendizaje del control sensoriomotor con sensores neuromórficos:hacia la percepción activa hiperdimensional" fue escrito por un doctorado en ciencias de la computación. los estudiantes Anton Mitrokhin y Peter Sutor, Jr .; Cornelia Fermüller, científico investigador asociado del Instituto de Estudios Informáticos Avanzados de la Universidad de Maryland; y el profesor de Ciencias de la Computación Yiannis Aloimonos. Aloimonos recomienda Mitrokhin y Sutor.
La integración es el desafío más importante al que se enfrenta el campo de la robótica. Los sensores de un robot y los actuadores que lo mueven son sistemas separados, unidos por un mecanismo de aprendizaje central que infiere una acción necesaria dados los datos del sensor, o viceversa.
El engorroso sistema de inteligencia artificial de tres partes, cada una de las cuales habla su propio idioma, es una forma lenta de lograr que los robots realicen tareas sensoriomotoras. El siguiente paso en robótica será integrar las percepciones de un robot con sus capacidades motoras. Esta fusión conocido como "percepción activa, "proporcionaría una forma más eficiente y rápida para que el robot complete las tareas".
En la nueva teoría informática de los autores, El sistema operativo de un robot se basaría en vectores binarios hiperdimensionales (VHB), que existen en un espacio escaso y de dimensiones extremadamente altas. Los VHB pueden representar cosas distintas y dispares, por ejemplo, una sola imagen, un concepto, un sonido o una instrucción; secuencias compuestas por cosas discretas; y agrupaciones de cosas y secuencias discretas. Pueden dar cuenta de todos estos tipos de información de una manera construida de manera significativa, uniendo cada modalidad en vectores largos de 1 y 0 con igual dimensión. En este sistema, posibilidades de acción, la entrada sensorial y otra información ocupan el mismo espacio, están en el mismo idioma, y se fusionan, creando una especie de memoria para el robot.
los Ciencia Robótica el papel marca la primera vez que la percepción y la acción se integran.
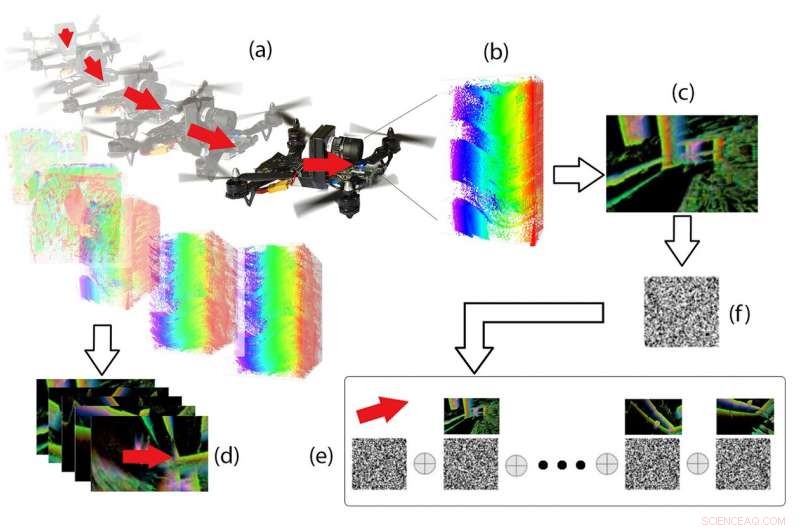
Canalización hiperdimensional. A partir de los datos del evento (b) registrados en el DVS durante el vuelo del dron (a), Se calculan las "imágenes de eventos" (c) y los vectores de movimiento 3D (d), y ambos se codifican como vectores binarios y se combinan en la memoria mediante operaciones vectoriales especiales (e). Dada una nueva imagen de evento (f), el movimiento 3D asociado se puede recuperar de la memoria. Crédito:Grupo de Percepción y Robótica, Universidad de Maryland.
Un marco hiperdimensional puede convertir cualquier secuencia de "instantes" en nuevos VHB, y agrupar los VHB existentes, todo en la misma longitud de vector. Esta es una forma natural de crear "recuerdos" informados y semánticamente significativos. La codificación de más y más información conduce a su vez a vectores "históricos" y la capacidad de recordar. Las señales se convierten en vectores, la indexación se traduce en memoria, y el aprendizaje ocurre a través de la agrupación.
Los recuerdos del robot de lo que ha sentido y hecho en el pasado podrían llevarlo a esperar una percepción futura e influir en sus acciones futuras. Esta percepción activa permitiría al robot volverse más autónomo y más capaz de completar tareas.
"Un perceptor activo sabe por qué desea sentir, luego elige qué percibir, y determina cómo, cuándo y dónde lograr la percepción, "dice Aloimonos." Selecciona y se fija en escenas, momentos en el tiempo, y episodios. Luego alinea sus mecanismos, sensores, y otros componentes para actuar sobre lo que quiere ver, y selecciona puntos de vista desde los que captar mejor lo que pretende ".
"Nuestro marco hiperdimensional puede abordar cada uno de estos objetivos".
Las aplicaciones de la investigación de Maryland podrían extenderse mucho más allá de la robótica. El objetivo final es poder hacer la IA en sí de una manera fundamentalmente diferente:desde los conceptos hasta las señales y el lenguaje. La computación hiperdimensional podría proporcionar un modelo alternativo más rápido y eficiente a la red neuronal iterativa y los métodos de inteligencia artificial de aprendizaje profundo que se utilizan actualmente en aplicaciones informáticas como la minería de datos. reconocimiento visual y traducción de imágenes a texto.
"Los métodos de IA basados en redes neuronales son grandes y lentos, porque no son capaces de recordar, ", dice Mitrokhin." Nuestro método de teoría hiperdimensional puede crear recuerdos, que requerirá mucho menos cálculo, y debería hacer esas tareas mucho más rápidas y eficientes ".
Una mejor detección de movimiento es una de las mejoras más importantes necesarias para integrar la detección de un robot con sus acciones. El uso de un sensor de visión dinámica (DVS) en lugar de cámaras convencionales para esta tarea ha sido un componente clave para probar la teoría de la computación hiperdimensional.
Las cámaras digitales y las técnicas de visión por computadora capturan escenas basadas en píxeles e intensidades en cuadros que solo existen "en el momento". No representan bien el movimiento porque el movimiento es una entidad continua.
Un DVS funciona de manera diferente. No "toma fotografías" en el sentido habitual, pero muestra una construcción diferente de la realidad que se adapta a los propósitos de los robots que necesitan abordar el movimiento. Capta la idea de ver movimiento, particularmente los bordes de los objetos a medida que se mueven. También conocida como "retina de silicio, "este sensor inspirado en la visión de los mamíferos registra de forma asincrónica los cambios de iluminación que se producen en cada píxel DVS. El sensor se adapta a una amplia gama de condiciones de iluminación, de oscuro a brillante, y puede resolver movimientos muy rápidos con baja latencia, propiedades ideales para aplicaciones en tiempo real en robótica, como la navegación autónoma. Los datos que acumula se adaptan mucho mejor al entorno integrado de la teoría de la computación hiperdimensional.
Un DVS registra un flujo continuo de eventos, donde se genera un evento cuando un píxel individual detecta un cierto cambio predefinido en el logaritmo de la intensidad de la luz. Esto se logra mediante circuitos analógicos integrados en cada píxel, y cada evento se informa con su ubicación de píxel y marca de tiempo de precisión de microsegundos.
"Los datos de este sensor, las nubes de eventos, son mucho más escasas que las secuencias de imágenes, "dice Cornelia Fermüller, uno de los autores del artículo de Science Robotics. "Es más, las nubes de eventos contienen la información esencial para codificar el espacio y el movimiento, conceptualmente los contornos de la escena y su movimiento ".
Los segmentos de nubes de eventos se codifican como vectores binarios. Esto hace que el DVS sea una buena herramienta para implementar la teoría de la computación hiperdimensional para fusionar la percepción con las habilidades motoras.
Un DVS ve eventos escasos en el tiempo, proporcionar información densa sobre los cambios en una escena, y permitiendo precisión, Percepción rápida y escasa de los aspectos dinámicos del mundo. Es un sensor diferencial asíncrono donde cada píxel actúa como un circuito completamente independiente que rastrea los cambios de intensidad de la luz. Cuando la detección de movimiento es realmente el tipo de visión que se necesita, el DVS es la herramienta preferida.














