Foto a la izquierda:práctica incorporada en el laboratorio RAD dirigida por Riley Watts (centro); foto de Catie Cuan. Foto a la derecha:práctica artística en el RAD Lab a través de una interpretación de "Time to Compile" en la Universidad de Brown Crédito:Keira Heu-Jwyn Chang.
Amy LaViers, investigadora de la Universidad de Illinois, ha introducido un nuevo punto de vista desde el cual observar las capacidades robóticas en su artículo, "Condes de mecánica, Configuraciones externas en comparación con computacionales, Configuraciones internas en sistemas naturales y artificiales, "publicado hoy en MÁS UNO , una revista de investigación interdisciplinaria líder.
LaViers lidera la robótica, Automatización, y laboratorio de danza (RAD), que se especializa en el desarrollo de sistemas robóticos expresivos. Típicamente, los robots tienen como objetivo replicar alguna forma de movimiento o acción natural. En entornos de la industria, como la fabricación o el inventario de almacén, los robots suelen tener un rendimiento mucho mejor con mayor precisión, precisión, y menor costo con el tiempo. Sin embargo, en situaciones más dinámicas, es más probable que los sistemas naturales superen a un robot. La realización de tareas controladas, por ejemplo, mucho de lo que se ve en un almacén, se puede cuantificar fácilmente, pero cuando se trata de situaciones más complejas, no ha habido una buena forma de hacerlo. El artículo de LaViers presenta un modelo de conteo simplificado que brinda una perspectiva numérica para comparar las capacidades expresivas de los robots y los seres naturales. Este es un tema que se explora en el RAD Lab a través de la colaboración interdisciplinaria con artistas y la práctica somática.
En informática, hay muchas variables que influyen en la potencia de un dispositivo, pero una forma común de modelarlo usa la cantidad de transistores que tiene el dispositivo. Tiempo extraordinario, el número de transistores ha aumentado y también lo ha hecho la potencia de cálculo, una tendencia que a menudo se conoce como Ley de Moore. Se puede establecer un paralelismo con los sistemas naturales entre los transistores que están "encendidos" y "apagados" y un modelo simplificado de neuronas:"disparando" y "no disparando". Tal recuento de transistores genera un cuello de botella estático para la capacidad computacional de las computadoras, ignorando los aspectos dinámicos de la velocidad del procesador, por ejemplo. LaViers notó que un recuento similar de configuraciones externas estáticas de robots podría revelar tendencias en la capacidad robótica. Es más, ella vinculó la computación y la mecanización en un robot a los cambios de estado internos y externos, respectivamente, en un organismo natural. Después de hacer estas comparaciones, LaViers puede comparar directamente cuán expresivos son los robots con los organismos naturales, como se muestra en la siguiente gráfica.
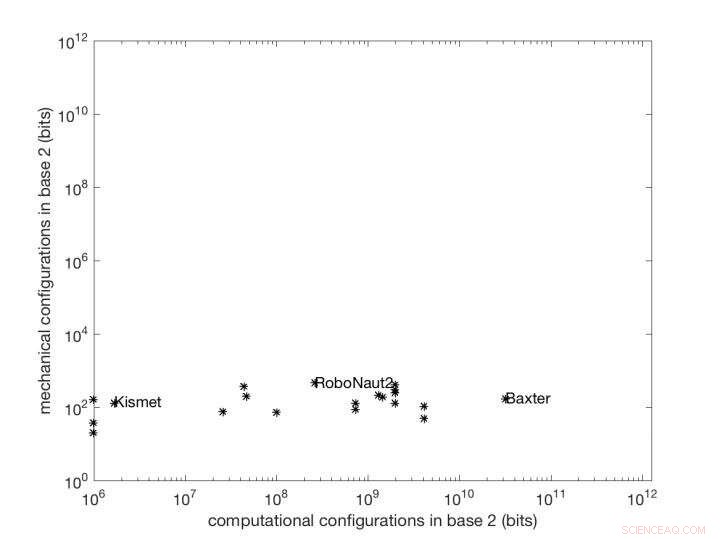
Trama del trabajo recientemente publicado de LaViers:una comparación del cambio en la complejidad interna versus externa de los robots durante los últimos 15 años. Crédito:Robótica de la Universidad de Illinois, Laboratorio de Automatización y Danza (RAD)
Su artículo se centra en dos modelos de un gusano microscópico (C. Elegans) y varios análisis parciales de organismos, así como el análisis de una variedad de robots modernos bien conocidos. Un gráfico de los hallazgos de LaViers muestra que, usando su método, los robots funcionan principalmente entre los dos modelos del gusano por lo expresivos que son. Es decir, un correlato natural apto para la expresividad de los sistemas robóticos existentes puede ser este pequeño gusano. Las comparaciones no son perfectas, pero proporcionan una simplificación de un problema complejo para comprender el panorama general:cuánto se puede progresar en el ámbito de la robótica en situaciones dinámicas.
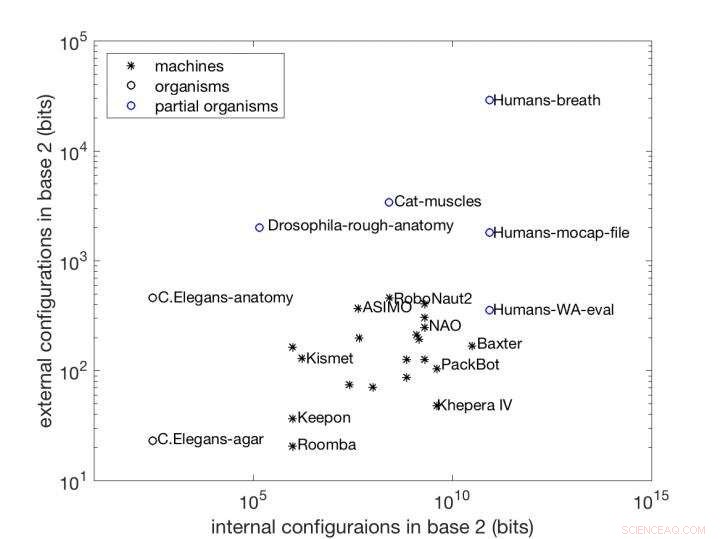
Una comparación del mismo grupo de robots con los sistemas naturales. Consulte la publicación para obtener más detalles. Crédito:Robótica de la Universidad de Illinois, Automatización, y laboratorio de danza (RAD)
En el campo de la robótica, las ventajas de la naturaleza a veces se pasan por alto. El trabajo de LaViers contextualiza el progreso realizado por los roboticistas a lo largo de los años. Los robots se han vuelto mucho más avanzados, pero en lo que respecta a la verdadera imitación de la naturaleza, todavía queda mucho por hacer. El aspecto innovador de su trabajo actual es que este modelo de conteo en particular no se ha utilizado antes en robótica.
"Lo que me enorgullece de este artículo es que las tendencias reveladas son un poco impactantes para la gente, y por eso ha llevado mucho tiempo publicarlo. ", Dijo LaViers." Los revisores en este lugar fueron de gran ayuda para fortalecer el documento. En el final, Es de esperar que el trabajo apunte a una forma de pensar sobre los sistemas artificiales versus los naturales que pueda ayudarnos a mejorar las fallas y la robustez de las máquinas en entornos dinámicos. Esa es la dirección para el trabajo futuro ".