Un nuevo "simulador de partículas" desarrollado por investigadores del MIT mejora la capacidad de los robots para moldear materiales en formas de objetivo simuladas e interactuar con objetos sólidos y líquidos. Esto podría dar a los robots un toque refinado para aplicaciones industriales o para robótica personal, como moldear arcilla o enrollar arroz de sushi pegajoso. Crédito:Instituto de Tecnología de Massachusetts
Un nuevo sistema de aprendizaje desarrollado por investigadores del MIT mejora la capacidad de los robots para moldear materiales en formas objetivo y hacer predicciones sobre la interacción con objetos sólidos y líquidos. El sistema, conocido como un simulador de partículas basado en el aprendizaje, podría dar a los robots industriales un toque más refinado, y podría tener aplicaciones divertidas en robótica personal, como modelar formas de plastilina o enrollar arroz pegajoso para sushi.
En planificación robótica, Los simuladores físicos son modelos que capturan cómo los diferentes materiales responden a la fuerza. Los robots se "entrenan" utilizando los modelos, para predecir los resultados de sus interacciones con los objetos, como empujar una caja sólida o pinchar arcilla deformable. Pero los simuladores tradicionales basados en el aprendizaje se enfocan principalmente en objetos rígidos y no pueden manejar fluidos u objetos más blandos. Algunos simuladores basados en la física más precisos pueden manejar diversos materiales, pero dependen en gran medida de técnicas de aproximación que introducen errores cuando los robots interactúan con objetos en el mundo real.
En un documento presentado en la Conferencia Internacional sobre Representaciones del Aprendizaje en mayo, los investigadores describen un nuevo modelo que aprende a capturar cómo pequeñas porciones de diferentes materiales ("partículas") interactúan cuando se pinchan y pinchan. El modelo aprende directamente de los datos en los casos en que la física subyacente de los movimientos es incierta o desconocida. Los robots pueden usar el modelo como guía para predecir cómo los líquidos, así como materiales rígidos y deformables, reaccionará a la fuerza de su toque. Mientras el robot maneja los objetos, el modelo también ayuda a refinar aún más el control del robot.
En experimentos, una mano robótica con dos dedos, llamado "RiceGrip, "moldeó con precisión una espuma deformable a una configuración deseada, como una forma de" T ", que sirve como un sustituto del arroz de sushi. En resumen, El modelo de los investigadores sirve como un tipo de cerebro de "física intuitiva" que los robots pueden aprovechar para reconstruir objetos tridimensionales de manera similar a como lo hacen los humanos.
"Los humanos tenemos un modelo de física intuitivo en la cabeza, donde podemos imaginar cómo se comportará un objeto si lo empujamos o apretamos. Basado en este modelo intuitivo, los humanos pueden realizar tareas de manipulación asombrosas que están mucho más allá del alcance de los robots actuales, "dice el primer autor Yunzhu Li, estudiante de posgrado en el Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL). "Queremos construir este tipo de modelo intuitivo para robots que les permita hacer lo que los humanos pueden hacer".
"Cuando los niños tienen 5 meses, ya tienen diferentes expectativas para sólidos y líquidos, "agrega el coautor Jiajun Wu, un estudiante de posgrado de CSAIL. "Eso es algo que sabemos a una edad temprana, así que quizás eso sea algo que deberíamos intentar modelar para robots ".
Junto a Li y Wu en el papel están:Russ Tedrake, investigador de CSAIL y profesor del Departamento de Ingeniería Eléctrica e Informática (EECS); Joshua Tenenbaum, profesor del Departamento de Ciencias Cerebrales y Cognitivas; y Antonio Torralba, profesor de EECS y director del MIT-IBM Watson AI Lab.
Gráficos dinámicos
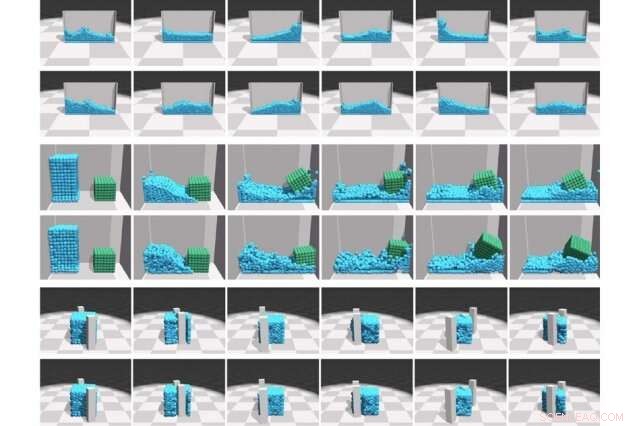
Una innovación clave detrás del modelo, denominada "red de interacción de partículas" (DPI-Nets), estaba creando gráficos de interacción dinámica, que consta de miles de nodos y bordes que pueden capturar comportamientos complejos de las llamadas partículas. En los gráficos, cada nodo representa una partícula. Los nodos vecinos están conectados entre sí mediante bordes dirigidos, que representan la interacción que pasa de una partícula a la otra. En el simulador, Las partículas son cientos de pequeñas esferas combinadas para formar un líquido o un objeto deformable.
Los gráficos se construyen como base para un sistema de aprendizaje automático llamado red neuronal de gráficos. Entrenando, el modelo, con el tiempo, aprende cómo reaccionan y se remodelan las partículas de diferentes materiales. Lo hace calculando implícitamente varias propiedades para cada partícula, como su masa y elasticidad, para predecir si la partícula se moverá en el gráfico y dónde se moverá cuando se perturbe.
Luego, el modelo aprovecha una técnica de "propagación", que distribuye instantáneamente una señal por todo el gráfico. Los investigadores personalizaron la técnica para cada tipo de material:rígido, deformable y líquido:para disparar una señal que predice las posiciones de las partículas en ciertos pasos de tiempo incrementales. En cada paso, se mueve y reconecta partículas, si es necesario.
Por ejemplo, si se empuja una caja sólida, las partículas perturbadas se moverán hacia adelante. Debido a que todas las partículas dentro de la caja están conectadas rígidamente entre sí, todas las demás partículas del objeto se mueven a la misma distancia calculada, rotación, y cualquier otra dimensión. Las conexiones de partículas permanecen intactas y la caja se mueve como una sola unidad. Pero si una zona de espuma deformable tiene una sangría, el efecto será diferente. Las partículas perturbadas avanzan mucho, las partículas circundantes se mueven hacia adelante solo ligeramente, y las partículas más lejanas no se moverán en absoluto. Con líquidos que se derraman en una taza, las partículas pueden saltar completamente de un extremo del gráfico al otro. El gráfico debe aprender a predecir dónde y cuánto se mueven todas las partículas afectadas, que es computacionalmente complejo.
Dar forma y adaptar
En su papel los investigadores demuestran el modelo asignando al robot RiceGrip de dos dedos la fijación de formas objetivo de espuma deformable. El robot primero utiliza una cámara de detección de profundidad y técnicas de reconocimiento de objetos para identificar la espuma. Los investigadores seleccionan partículas al azar dentro de la forma percibida para inicializar la posición de las partículas. Luego, el modelo agrega bordes entre partículas y reconstruye la espuma en un gráfico dinámico personalizado para materiales deformables.
Debido a las simulaciones aprendidas, el robot ya tiene una buena idea de cómo cada toque, dada una cierta cantidad de fuerza, afectará a cada una de las partículas en el gráfico. Cuando el robot comienza a sangrar la espuma, hace coincidir iterativamente la posición de las partículas en el mundo real con la posición objetivo de las partículas. Siempre que las partículas no se alineen, envía una señal de error al modelo. Esa señal modifica el modelo para que coincida mejor con la física del material en el mundo real.
Próximo, los investigadores tienen como objetivo mejorar el modelo para ayudar a los robots a predecir mejor las interacciones con escenarios parcialmente observables, como saber cómo se moverá una pila de cajas cuando se empuje, incluso si solo las cajas en la superficie son visibles y la mayoría de las otras cajas están ocultas.
Los investigadores también están explorando formas de combinar el modelo con un módulo de percepción de extremo a extremo operando directamente sobre imágenes. Este será un proyecto conjunto con el grupo de Dan Yamins; Yamin completó recientemente su posdoctorado en el MIT y ahora es profesor asistente en la Universidad de Stanford. "Estás lidiando con estos casos todo el tiempo en los que solo hay información parcial, "Dice Wu." Estamos ampliando nuestro modelo para aprender la dinámica de todas las partículas, mientras que solo ve una pequeña porción ".
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.














