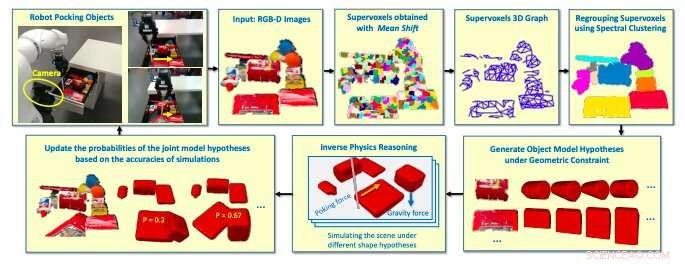
Flujo de trabajo del sistema integrado. Crédito:Song &Boularias.
Investigadores de la Universidad de Rutgers han desarrollado recientemente un enfoque probabilístico para construir modelos 3-D de objetos desconocidos mientras son manipulados por un robot. Su enfoque descrito en un artículo publicado previamente en arXiv, utiliza un motor de física para verificar geometrías hipotéticas en simulaciones.
La mayoría de los primates aprenden naturalmente a manipular una variedad de objetos en sus primeros años de vida. Replicar esta capacidad aparentemente trivial en robots, sin embargo, hasta ahora ha demostrado ser un gran desafío.
Estudios anteriores han intentado lograr esto utilizando una variedad de algoritmos de manipulación, que normalmente requieren conocimiento de los modelos geométricos asociados con los objetos que manipulará el robot. Estos modelos pueden ser útiles si los objetos encontrados por el robot se conocen de antemano, sin embargo, a menudo fallan cuando estos objetos son desconocidos.
"Consideramos específicamente las tareas de manipulación en montones de desorden que contienen objetos nunca antes vistos, "Los investigadores de la Universidad de Rutgers escribieron en su artículo." Uno de los aspectos novedosos de este trabajo es la utilización de un motor de física para verificar geometrías hipotéticas en simulación. La evidencia proporcionada por las simulaciones físicas se utiliza en un marco probabilístico que explica el hecho de que las propiedades mecánicas de los objetos son inciertas ".
El sistema integrado desarrollado por los investigadores tiene varios componentes:un manipulador robótico, un módulo de segmentación y agrupación, y una unidad de razonamiento físico inverso. El manipulador robótico está diseñado para empujar o empujar objetos en una pila de desorden, mientras que el módulo de segmentación y agrupación puede detectar objetos en imágenes RGB-D.
Finalmente, la unidad de razonamiento físico inverso, que es el rasgo distintivo de su enfoque, infiere partes faltantes de objetos al reproducir las acciones del robot en la simulación. Esencialmente, la unidad utiliza múltiples formas hipotéticas y asigna mayores probabilidades a las que mejor se adaptan a las imágenes RGB-D observadas.
Los investigadores desarrollaron un algoritmo de razonamiento físico inverso (IPR) que puede inferir partes ocluidas de objetos en función de sus movimientos observados e interacciones mutuas. Capacitar y evaluar su sistema, utilizaron dos conjuntos de datos:un conjunto de datos de Voxlets y un nuevo conjunto de datos creado utilizando objetos de referencia YCB. El conjunto de datos de Voxlets contiene imágenes estáticas de objetos de sobremesa, mientras que la nueva base de datos compilada por ellos incluye montones de objetos más densos.
El equipo evaluó el nuevo enfoque en una serie de experimentos utilizando un brazo robótico Kuka montado en una plataforma móvil Clearpath y equipado con una mano Robotiq y una cámara de detección de profundidad. En estas pruebas, al robot se le presentaron objetos desconocidos en diferentes escenarios. Los hallazgos recopilados por los investigadores fueron muy prometedores, con su algoritmo IPR inferir formas mejor que otros enfoques.
"Los experimentos con un robot muestran que este enfoque es eficaz para construir modelos 3D físicamente realistas, que puede ser útil para la planificación de la manipulación, "Los investigadores escribieron." Los experimentos también muestran que el enfoque propuesto supera significativamente los enfoques alternativos en términos de precisión de forma ".
El nuevo enfoque probabilístico presentado por los investigadores podría ayudar a mejorar el rendimiento de los robots en tareas de manipulación. En su trabajo futuro, planean desarrollar aún más su enfoque, para que pueda inferir modelos 3D y mecánicos simultáneamente.
© 2019 Science X Network