Investigadores del MIT y otros lugares han desarrollado robots computacionalmente simples que se conectan en grandes grupos para moverse, transporte de objetos, y completar otras tareas. Crédito:Felice Frankel
Siguiendo el ejemplo de las células biológicas, investigadores del MIT, Universidad de Colombia, y en otros lugares han desarrollado robots computacionalmente simples que se conectan en grandes grupos para moverse, transporte de objetos, y completar otras tareas.
Este sistema de "robótica de partículas", basado en un proyecto del MIT, Ingeniería de Columbia, Universidad de Cornell, e investigadores de la Universidad de Harvard — comprende muchas unidades individuales en forma de disco llamadas apropiadamente "partículas". Las partículas están débilmente conectadas por imanes alrededor de sus perímetros. Cada partícula solo puede hacer dos cosas:expandirse y contraerse. Pero ese movimiento cuando se cronometra cuidadosamente, permite que las partículas individuales se empujen y tiren unas de otras en un movimiento coordinado. Los sensores integrados permiten que el grupo gravite hacia las fuentes de luz.
en un Naturaleza papel, los investigadores demuestran un grupo de dos docenas de partículas robóticas reales y una simulación virtual de hasta 100, 000 partículas moviéndose a través de obstáculos hacia una bombilla. También muestran que un robot de partículas puede transportar objetos colocados en su medio.
Los robots de partículas se pueden formar en muchas configuraciones y navegar con fluidez alrededor de obstáculos y atravesar espacios estrechos. Notablemente, Ninguna de las partículas se comunica directamente o depende entre sí para funcionar, por lo que las partículas se pueden agregar o restar sin ningún impacto en el grupo. En su papel Los investigadores muestran que los sistemas robóticos de partículas pueden completar tareas incluso cuando muchas unidades funcionan mal.
El artículo representa una nueva forma de pensar sobre los robots, que están diseñados tradicionalmente para un propósito, comprenden muchas partes complejas, y dejar de trabajar cuando alguna pieza no funcione correctamente. Robots formados por estos componentes simplistas, los investigadores dicen, podría permitir más escalable, flexible, y sistemas robustos.
"Tenemos pequeñas células robóticas que no son tan capaces como individuos pero que pueden lograr mucho como grupo, "dice Daniela Rus, director del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) y el Profesor Andrew y Erna Viterbi de Ingeniería Eléctrica e Informática. "El robot por sí solo es estático, pero cuando se conecta con otras partículas de robot, de repente, el colectivo de robots puede explorar el mundo y controlar acciones más complejas. Con estas 'células universales, 'las partículas del robot pueden alcanzar diferentes formas, transformación global, movimiento global, comportamiento global, y, como hemos demostrado en nuestros experimentos, siga los gradientes de luz. Esto es muy poderoso ".
Junto a Rus en el papel están:el primer autor Shuguang Li, un postdoctorado de CSAIL; la co-primera autora Richa Batra y el autor correspondiente Hod Lipson, ambos de Columbia Engineering; David Brown, Hyun-Dong Chang, y Nikhil Ranganathan de Cornell; y Chuck Hoberman de Harvard.
En el MIT, Rus ha estado trabajando en modular, robots conectados durante casi 20 años, incluido un robot de cubo en expansión y contracción que podría conectarse con otros para moverse. Pero la forma cuadrada limitaba el movimiento y las configuraciones del grupo de los robots.
En colaboración con el laboratorio de Lipson, donde Li fue un estudiante de posgrado hasta que llegó al MIT en 2014, los investigadores optaron por mecanismos en forma de disco que pueden rotar entre sí. También pueden conectarse y desconectarse entre sí, y formar en muchas configuraciones.
Cada unidad de un robot de partículas tiene una base cilíndrica, que alberga una batería, un pequeño motor, sensores que detectan la intensidad de la luz, un microcontrolador, y un componente de comunicación que envía y recibe señales. Montado en la parte superior hay un juguete para niños llamado Hoberman Flight Ring (su inventor es uno de los coautores del artículo) que consiste en pequeños paneles conectados en una formación circular que se puede tirar para expandir y empujar hacia atrás para contraer. Se instalan dos pequeños imanes en cada panel.
El truco consistía en programar las partículas robóticas para expandirse y contraerse en una secuencia exacta para empujar y tirar de todo el grupo hacia una fuente de luz de destino. Para hacerlo los investigadores equiparon cada partícula con un algoritmo que analiza la información difundida sobre la intensidad de la luz de cada otra partícula, sin la necesidad de una comunicación directa de partícula a partícula.
Los sensores de una partícula detectan la intensidad de la luz de una fuente de luz; cuanto más cerca esté la partícula de la fuente de luz, cuanto mayor sea la intensidad. Cada partícula emite constantemente una señal que comparte su nivel de intensidad percibida con todas las demás partículas. Supongamos que un sistema robótico de partículas mide la intensidad de la luz en una escala de niveles del 1 al 10:las partículas más cercanas a la luz registran un nivel 10 y las más alejadas registran el nivel 1. El nivel de intensidad, Sucesivamente, corresponde a un tiempo específico en el que la partícula debe expandirse. Las partículas que experimentan la mayor intensidad (nivel 10) se expanden primero. A medida que esas partículas se contraen, las siguientes partículas en orden, nivel 9, luego expanda. Ese movimiento de expansión y contracción cronometrado ocurre en cada nivel subsiguiente.
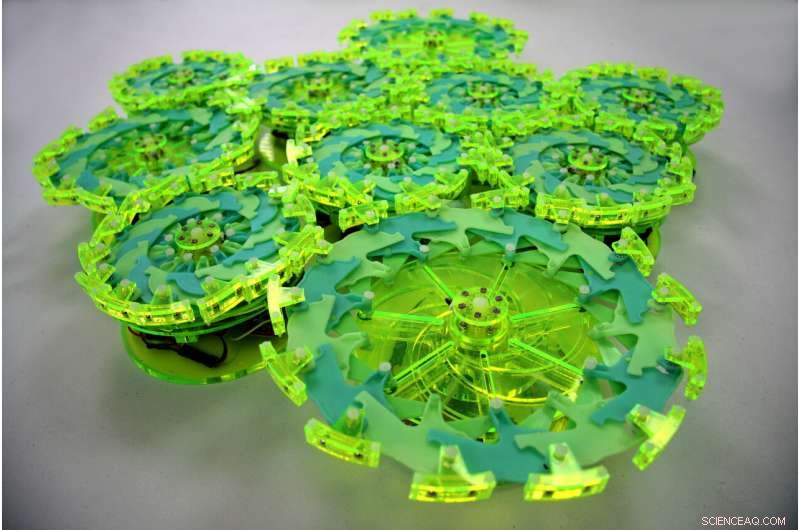
Los robots de partículas se componen de componentes poco acoplados, o partículas, que carecen de identidad individual o puesto direccionable. Solo son capaces de un movimiento simple:expansión y contracción. Sin embargo, cuando un grupo de partículas se coordina para moverse como colectivo, se observa un comportamiento interesante. Incluso en configuraciones amorfas, Los robots de partículas aprovechan los fenómenos de la mecánica estadística para producir locomoción. Crédito:Shuguang Li / Columbia Engineering
"Esto crea una onda de expansión-contracción mecánica, un movimiento coordinado de empuje y arrastre, que mueve un gran grupo hacia o lejos de los estímulos ambientales, "Li dice. El componente clave, Li agrega, es la sincronización precisa de un reloj sincronizado compartido entre las partículas que permite el movimiento de la manera más eficiente posible:"Si estropeas el reloj sincronizado, el sistema funcionará de forma menos eficiente ".
En videos, Los investigadores demuestran un sistema robótico de partículas que comprende partículas reales que se mueven y cambian de dirección hacia diferentes bombillas a medida que se encienden. y abriéndose camino a través de una brecha entre obstáculos. En su papel los investigadores también muestran que grupos simulados de hasta 10, 000 partículas mantienen la locomoción, a la mitad de su velocidad, incluso con hasta el 20 por ciento de las unidades falladas.
"Es un poco como la proverbial 'sustancia viscosa gris, '"dice Lipson, profesor de ingeniería mecánica en Columbia Engineering, haciendo referencia al concepto de ciencia ficción de un robot autorreplicante que comprende miles de millones de nanobots. "La principal novedad aquí es que tienes un nuevo tipo de robot que no tiene control centralizado, no hay un solo punto de falla, sin forma fija, y sus componentes no tienen una identidad única ".
El siguiente paso, Lipson agrega, está miniaturizando los componentes para hacer un robot compuesto por millones de partículas microscópicas.