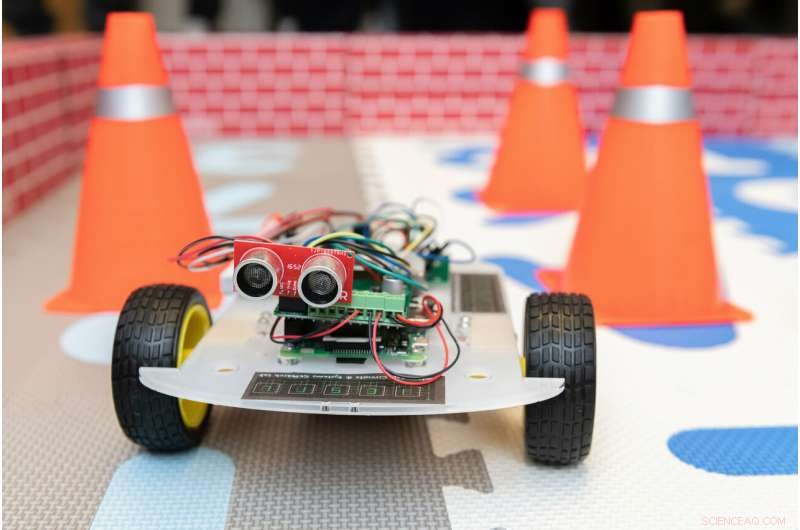
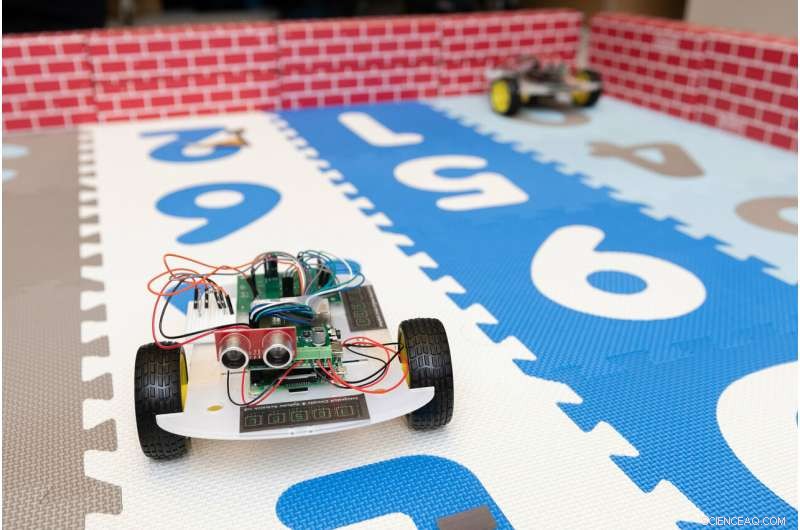
Un automóvil robótico controlado por un chip híbrido de potencia ultrabaja se muestra en una arena para demostrar su capacidad para aprender y colaborar con otro robot. Crédito:Allison Carter, Georgia Tech
Un chip híbrido de energía ultrabaja inspirado en el cerebro podría ayudar a que los robots del tamaño de la palma de la mano puedan colaborar y aprender de sus experiencias. Combinado con las nuevas generaciones de motores y sensores de baja potencia, el nuevo circuito integrado específico de la aplicación (ASIC), que funciona con milivatios de potencia, podría ayudar a que los robots de enjambre inteligentes funcionen durante horas en lugar de minutos.
Para conservar energía, los chips utilizan un procesador de dominio de tiempo híbrido digital-analógico en el que el ancho de pulso de las señales codifica la información. La red neuronal IC se adapta tanto a la programación basada en modelos como al aprendizaje por refuerzo colaborativo, potencialmente proporcionando a los pequeños robots mayores capacidades para el reconocimiento, misiones de búsqueda y rescate y otras.
Investigadores del Instituto de Tecnología de Georgia demostraron autos robóticos impulsados por ASIC únicos en la Conferencia Internacional de Circuitos de Estado Sólido (ISSCC) IEEE de 2019. La investigación fue patrocinada por la Agencia de Proyectos de Investigación Avanzada de Defensa (DARPA) y la Corporación de Investigación de Semiconductores (SRC) a través del Centro de Computación Inspirada en el Cerebro que Habilita la Inteligencia Autónoma (CBRIC).
"Estamos tratando de llevar inteligencia a estos pequeños robots para que puedan aprender sobre su entorno y moverse de forma autónoma". sin infraestructura, "dijo Arijit Raychowdhury, profesor asociado en la Escuela de Ingeniería Eléctrica e Informática de Georgia Tech. "Para lograr eso, queremos llevar conceptos de circuitos de bajo consumo a estos dispositivos muy pequeños para que puedan tomar decisiones por sí mismos. Existe una gran demanda de productos muy pequeños, pero robots capaces que no requieren infraestructura ".
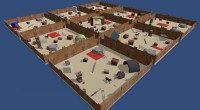
Los autos demostrados por Raychowdhury y los estudiantes graduados Ningyuan Cao, Muya Chang y Anupam Golder navegan por una arena con piso de goma y rodeada de paredes de bloques de cartón. Mientras buscan un objetivo, los robots deben evitar los conos de tráfico y entre ellos, aprender del entorno a medida que avanzan y comunicarse continuamente entre sí.
Los coches utilizan sensores de inercia y ultrasonidos para determinar su ubicación y detectar objetos a su alrededor. La información de los sensores va al ASIC híbrido, que sirve como el "cerebro" de los vehículos. Las instrucciones luego van a un controlador Raspberry Pi, que envía instrucciones a los motores eléctricos.
En robots del tamaño de la palma de la mano, Tres sistemas principales consumen energía:los motores y controladores utilizados para conducir y dirigir las ruedas, el procesador, y el sistema de detección. En los coches construidos por el equipo de Raychowdhury, el ASIC de baja potencia significa que los motores consumen la mayor parte de la energía. "Hemos podido reducir la potencia de cálculo a un nivel en el que el presupuesto está dominado por las necesidades de los motores, " él dijo.
El equipo está trabajando con colaboradores en motores que utilizan tecnología microelectromecánica (MEMS) capaces de operar con mucha menos potencia que los motores convencionales.
"Querríamos construir un sistema en el que la potencia de detección, comunicaciones y potencia informática, y la actuación están aproximadamente al mismo nivel, del orden de cientos de milivatios, "dijo Raychowdhury, quien es el Profesor Asociado de ON Semiconductor en la Escuela de Ingeniería Eléctrica e Informática. "Si podemos construir estos robots del tamaño de la palma de la mano con motores y controladores eficientes, deberíamos poder proporcionar tiempos de ejecución de varias horas con un par de pilas AA. Ahora tenemos una buena idea de qué tipo de plataformas informáticas necesitamos para ofrecer esto, pero todavía necesitamos los otros componentes para ponernos al día ".
En computación en el dominio del tiempo, la información se transporta en dos voltajes diferentes, codificado en el ancho de los pulsos. Eso le da a los circuitos las ventajas de eficiencia energética de los circuitos analógicos con la robustez de los dispositivos digitales.
"El tamaño del chip se reduce a la mitad, y el consumo de energía es un tercio de lo que necesitaría un chip digital tradicional, ", dijo Raychowdhury." Usamos varias técnicas tanto en diseños lógicos como de memoria para reducir el consumo de energía al rango de milivatios mientras cumplimos con el rendimiento objetivo ".
Con cada ancho de pulso representando un valor diferente, el sistema es más lento que los dispositivos digitales o analógicos, pero Raychowdhury dice que la velocidad es suficiente para los pequeños robots. (Un milivatio es una milésima de un vatio).
Two robotic cars controlled by an ultra-low power hybrid chip are shown in a test arena where they will demonstrate an ability to learn and collaborate. Crédito:Allison Carter, Georgia Tech
"For these control systems, we don't need circuits that operate at multiple gigahertz because the devices aren't moving that quickly, " he said. "We are sacrificing a little performance to get extreme power efficiencies. Even if the compute operates at 10 or 100 megahertz, that will be enough for our target applications."
The 65-nanometer CMOS chips accommodate both kinds of learning appropriate for a robot. The system can be programmed to follow model-based algorithms, and it can learn from its environment using a reinforcement system that encourages better and better performance over time—much like a child who learns to walk by bumping into things.
"You start the system out with a predetermined set of weights in the neural network so the robot can start from a good place and not crash immediately or give erroneous information, " Raychowdhury said. "When you deploy it in a new location, the environment will have some structures that it will recognize and some that the system will have to learn. The system will then make decisions on its own, and it will gauge the effectiveness of each decision to optimize its motion."
Communication between the robots allow them to collaborate to seek a target.
"In a collaborative environment, the robot not only needs to understand what it is doing, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."