¿Hay gente ahí abajo que necesite ayuda? Crédito:Fotografía Roschetzky / Shutterstock.com
Cuando ocurren desastres, ya sea un desastre natural como una inundación o un terremoto, o uno causado por humanos como un tiroteo masivo o un bombardeo:puede ser extremadamente peligroso enviar socorristas, a pesar de que hay personas que necesitan ayuda urgentemente.
Los drones son útiles, y están ayudando en la recuperación después de los tornados mortales de Alabama, pero la mayoría requiere pilotos individuales, que vuelan la aeronave no tripulada por control remoto. Eso limita la rapidez con que los rescatistas pueden ver una zona afectada completa, y puede retrasar que la ayuda real llegue a las víctimas.
Los drones autónomos podrían cubrir más terreno más rápidamente, pero solo sería más efectivo si pudieran por sí mismos ayudar a los rescatistas a identificar a las personas necesitadas. En el Laboratorio de Visión de la Universidad de Dayton, Estamos trabajando en el desarrollo de sistemas que puedan ayudar a detectar personas o animales, especialmente aquellos que podrían quedar atrapados por los escombros caídos. Nuestra tecnología imita el comportamiento de un rescatador humano, mirando brevemente áreas amplias y eligiendo rápidamente regiones específicas en las que enfocarse, para examinar más de cerca.
Buscando un objeto en una escena caótica
Las áreas de desastre a menudo están abarrotadas de árboles caídos, edificios derrumbados, Carreteras destrozadas y otros desorden que pueden dificultar mucho la detección de víctimas que necesitan ser rescatadas.
Mi equipo de investigación ha desarrollado un sistema de red neuronal artificial que puede ejecutarse en una computadora a bordo de un dron. Este sistema puede emular algunas de las excelentes formas en que funciona la visión humana. Analiza imágenes capturadas por la cámara del dron y comunica hallazgos notables a los supervisores humanos.
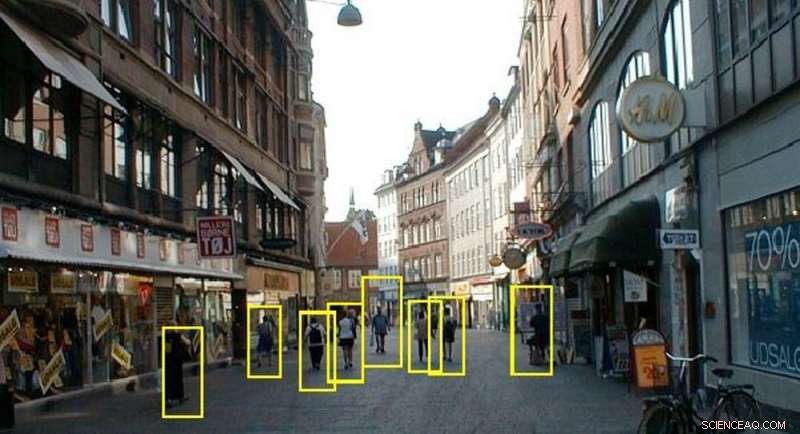
Nuestro sistema puede detectar personas en un entorno ajetreado. Crédito:Laboratorio de Visión de la Universidad de Dayton, CC BY-ND
Primero, nuestro sistema procesa las imágenes para mejorar su claridad. Así como los humanos entrecierran los ojos para ajustar su enfoque, Nuestras tecnologías toman estimaciones detalladas de las regiones más oscuras en una escena y aclaran computacionalmente las imágenes. Cuando las imágenes son demasiado borrosas o nebulosas, el sistema reconoce que son demasiado brillantes y reduce la blancura de la imagen para ver la escena real con mayor claridad.
En un ambiente lluvioso, Los cerebros humanos utilizan una estrategia brillante para ver con claridad. Al notar las partes de una escena que no cambian y las que sí lo hacen, a medida que caen las gotas de lluvia, la gente puede ver razonablemente bien a pesar de la lluvia. Nuestra tecnología utiliza la misma estrategia, investigar continuamente el contenido de cada ubicación en una secuencia de imágenes para obtener información clara sobre los objetos en esa ubicación.
También hemos desarrollado tecnología que puede hacer que las imágenes de una cámara transportada por drones sean más grandes, más brillante y claro. Al expandir el tamaño de la imagen, tanto los algoritmos como las personas pueden ver las características clave con mayor claridad.
Confirmación de objetos de interés
Nuestro sistema puede identificar personas en varios puestos, como tumbarse boca abajo o acurrucado en posición fetal, incluso desde diferentes ángulos de visión y en distintas condiciones de iluminación.
El cerebro humano puede mirar una vista de un objeto e imaginar cómo se vería desde otros ángulos. Cuando la policía emite una alerta pidiendo al público que busque a alguien, a menudo incluyen una foto fija, sabiendo que las mentes de los espectadores imaginarán vistas tridimensionales de cómo podría verse esa persona, y reconocerlos en la calle, incluso si no obtienen exactamente la misma vista que la foto ofrecida. Empleamos esta estrategia calculando modelos tridimensionales de personas, ya sean formas humanas generales o proyecciones más detalladas de personas específicas. Estos modelos se utilizan para hacer coincidir similitudes cuando una persona aparece en una escena.
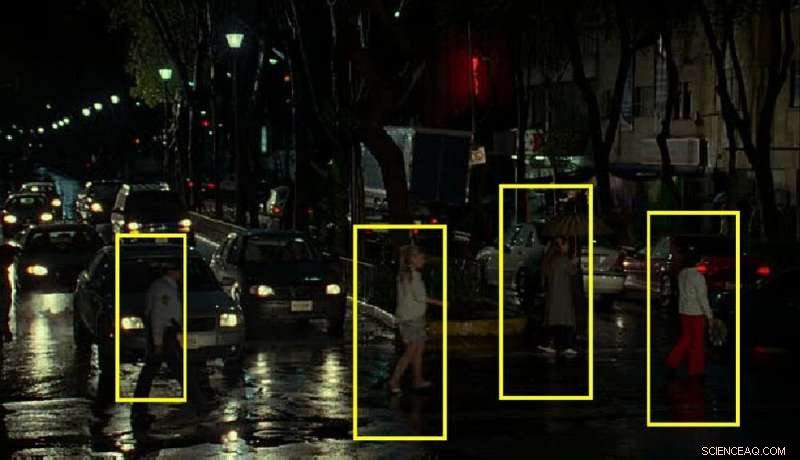
La iluminación confusa y tenue puede dificultar la identificación de las personas. Crédito:Laboratorio de Visión de la Universidad de Dayton, CC BY-ND
También hemos desarrollado una forma de detectar partes de un objeto, sin verlo todo. Nuestro sistema se puede entrenar para detectar y localizar una pierna que sobresale de debajo de los escombros, una mano saludando a la distancia, o una cabeza que asoma por encima de una pila de bloques de madera. Puede distinguir a una persona o animal de un árbol, arbusto o vehículo.
Poniendo las piezas juntas
Durante su exploración inicial del paisaje, nuestro sistema imita el enfoque de un observador en el aire, examinar el terreno para encontrar posibles objetos de interés o regiones que merezcan un examen más detenido, y luego mirando más de cerca. Por ejemplo, un piloto de aeronave que busca un camión en tierra suele prestar menos atención a los lagos, estanques campos agrícolas y patios de recreo, porque es menos probable que haya camiones en esas áreas. Nuestra tecnología autónoma emplea la misma estrategia para enfocar el área de búsqueda a las regiones más significativas de la escena.
Luego, nuestro sistema investiga cada región seleccionada para obtener información sobre la forma, estructura y textura de los objetos allí. Cuando detecta un conjunto de características que coinciden con un ser humano o parte de un humano, señala eso como la ubicación de una víctima.
El dron también recopila datos GPS sobre su ubicación, y detecta qué tan lejos está de otros objetos que está fotografiando. Esa información permite que el sistema calcule exactamente la ubicación de cada persona que necesita asistencia. y alertar a los rescatistas.
Todo este proceso:capturar una imagen, procesarlo para obtener la máxima visibilidad y analizarlo para identificar a las personas que podrían estar atrapadas u ocultas:toma aproximadamente una quinta parte de un segundo en la computadora portátil normal que lleva el dron, junto con su cámara de alta resolución.
El ejército de los Estados Unidos está interesado en esta tecnología. Hemos trabajado con el Comando de Material e Investigación Médica del Ejército de los EE. UU. Para encontrar personas heridas en un campo de batalla que necesiten ser rescatadas. Hemos adaptado este trabajo para atender a las empresas de servicios públicos que buscan intrusiones en los caminos de las tuberías por parte de equipos de construcción o vehículos que puedan dañar las tuberías. Las empresas de servicios públicos también están interesadas en detectar nuevas construcciones de edificios cerca de las vías de las tuberías. Todos estos grupos, y muchos más, están interesados en la tecnología que puede ver como los humanos pueden ver, especialmente en lugares donde los humanos no pueden estar.
Este artículo se ha vuelto a publicar de The Conversation con una licencia de Creative Commons. Lea el artículo original.