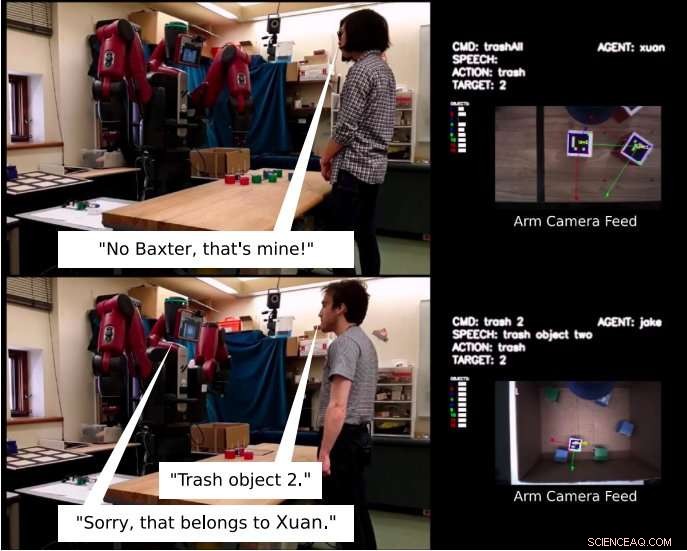
Aprendizaje de la propiedad a través de la interacción humano-robot. Arriba:el robot es detenido verbalmente en mitad de la acción por Xuan para que no descarte el objeto 2. Abajo:Habiendo aprendido las relaciones de propiedad y los permisos de acción al interactuar con Xuan, el robot niega la solicitud de Jake de descartar el objeto 2. Crédito:Tan, Brawer y Scassellati.
Un equipo de investigadores de la Universidad de Yale ha desarrollado recientemente un sistema robótico capaz de representar, aprender e inferir relaciones y normas de propiedad. Su estudio, prepublicado en arXiv, aborda algunos de los complejos desafíos asociados con la enseñanza de las normas sociales de los robots y cómo cumplirlas.
A medida que los robots se vuelven más frecuentes, es importante para ellos poder comunicarse con los humanos de manera efectiva y apropiada. Un aspecto clave de las interacciones humanas es comprender y comportarse de acuerdo con las normas sociales y morales, ya que esto promueve la coexistencia positiva con los demás.
Las normas de propiedad son un conjunto de normas sociales que ayudan a navegar en entornos compartidos de formas más consideradas hacia los demás. Enseñar estas normas a los robots podría mejorar sus interacciones con los humanos, permitiéndoles distinguir entre herramientas no propias y herramientas propias que se comparten temporalmente con ellos.
"Mi laboratorio de investigación se centra en la creación de robots con los que las personas puedan interactuar fácilmente, "Brian Scassellati, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Parte de ese trabajo consiste en analizar cómo podemos enseñar a las máquinas conceptos sociales comunes, cosas que son esenciales para nosotros como seres humanos pero que no siempre son los temas que más llaman la atención. Comprensión de la propiedad de objetos, permisos, y las costumbres es uno de estos temas que realmente no ha recibido mucha atención, pero será fundamental para la forma en que operan las máquinas en nuestros hogares, escuelas, y oficinas ".
En el enfoque ideado por Scassellati, Xuan Tan y Jake Brawer, la propiedad se representa como un gráfico de relaciones probabilísticas entre los objetos y sus propietarios. Esto se combina con una base de datos de normas basadas en predicados, que restringen las acciones que el robot puede realizar utilizando objetos propios.
"Uno de los desafíos en este trabajo es que algunas de las formas en que aprendemos acerca de la propiedad son a través de reglas explícitas (p. Ej., 'no tomes mis herramientas') y otros se aprenden a través de la experiencia, ", Dijo Scassellati." Combinar estos dos tipos de aprendizaje puede ser fácil para las personas, pero es mucho más desafiante para los robots ".
El sistema ideado por los investigadores combina un nuevo algoritmo incremental de aprendizaje de normas que es capaz tanto de aprendizaje de una sola vez como de inducción a partir de ejemplos, con la inferencia bayesiana de las relaciones de propiedad en respuesta a aparentes violaciones de las reglas y la predicción basada en la percepción de los posibles propietarios de un objeto. Juntos, Estos componentes permiten que el sistema aprenda las normas y relaciones de propiedad aplicables en una variedad de situaciones.
"La clave del trabajo que hicieron Xuan y Jake fue combinar dos tipos diferentes de representación de aprendizaje automático, uno que aprende de estos explícitos, reglas simbólicas y una que aprende de pequeños pedazos de experiencia, ", Explicó Scassellati." Hacer que estos dos sistemas funcionen juntos es lo que hace que esto sea un desafío, y en el fin, lo que hizo que esto tuviera éxito ".
Los investigadores evaluaron el rendimiento de su sistema robótico en una serie de experimentos simulados y del mundo real. Descubrieron que podía completar de manera efectiva las tareas de manipulación de objetos que requerían seguir una variedad de normas de propiedad, con notable competencia y flexibilidad.
El estudio realizado por Scassellati y sus colegas ofrece un ejemplo notable de cómo se puede entrenar a los robots para inferir y respetar las normas sociales. La investigación adicional podría aplicar constructos similares a otras capacidades relacionadas con las normas y abordar situaciones complejas en las que diferentes normas u objetivos están en conflicto entre sí.
"Seguimos estudiando cómo construir robots que interactúen de forma más natural con las personas, y este estudio simplemente se centra en un aspecto de este trabajo, ", Dijo Scassellati.
© 2018 Science X Network