Un enjambre robótico. El robot elegido en este estudio fue el kilobot. Crédito:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Cientos de pequeños robots pueden trabajar en equipo para crear formas inspiradas en la biología sin un plan maestro subyacente. puramente basado en la comunicación y el movimiento local. Lograr esto, investigadores del EMBL, CRG y el Laboratorio de Robótica de Bristol introdujeron los principios biológicos de la autoorganización en la robótica de enjambres. Los resultados han sido publicados en Ciencia Robótica .
"Demostramos que es posible aplicar los conceptos de autoorganización de la naturaleza a la tecnología humana como los robots, ", dice el líder del grupo EMBL Barcelona, James Sharpe." Eso es fascinante porque la tecnología es muy frágil en comparación con la solidez que vemos en biología. Si un componente del motor de un automóvil se descompone, por lo general, resulta en un automóvil que no funciona. Por el contrario, cuando falla un elemento en un sistema biológico, por ejemplo, si una célula muere inesperadamente, no compromete todo el sistema, y generalmente será reemplazado por otra celda más adelante. Si pudiéramos lograr la misma autoorganización y autorreparación en tecnología, podemos permitir que sea mucho más útil de lo que es ahora ". Sharpe dirigió el proyecto, iniciado en el Centro de Regulación Genómica (CRG) con Sabine Hauert en la Universidad de Bristol.
Formación de formas como se ve en los enjambres de robots
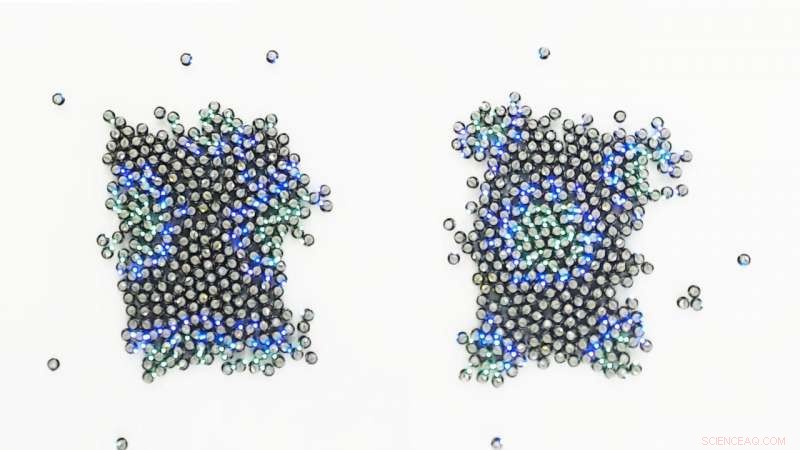
Los experimentos completos duraron una media de tres horas y media. Inspirado por la biología, los robots almacenan morfógenos, moléculas virtuales que llevan la información del patrón. Los colores indican la concentración de morfógeno de los robots individuales:el verde indica valores de morfógeno muy altos, azul y violeta indican valores más bajos, y la ausencia de color indica la ausencia virtual del morfógeno en el robot. La concentración de morfógeno de cada robot se transmite a los robots vecinos dentro de un rango de 10 centímetros. El patrón general de manchas que emerge impulsa la reubicación de los robots para que crezcan protuberancias que se extienden desde el enjambre.
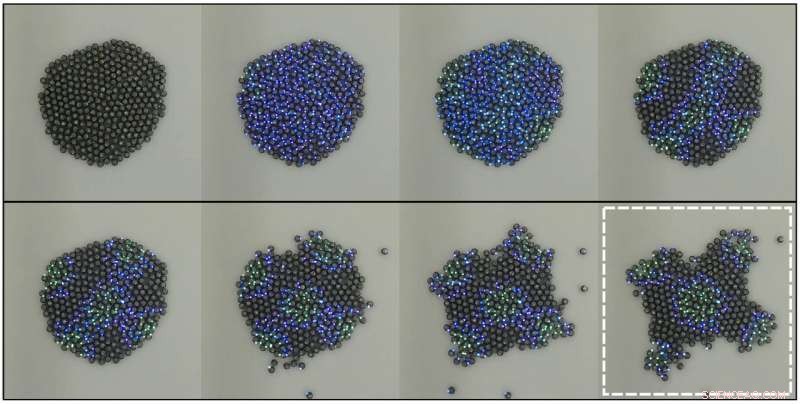
Aparición de diferentes morfologías de enjambre a través de un patrón de difusión de Turing. Crédito:Slavkov et al., Sci. Robot. 3, eaau9178 (2018)
Reglas de Turing
La única información que el equipo instaló en los robots del tamaño de una moneda fueron las reglas básicas sobre cómo interactuar con los vecinos. De hecho, programaron específicamente los robots en el enjambre para actuar de manera similar a las células en un tejido. Esas reglas 'genéticas' imitan el sistema responsable de los patrones de Turing observados en la naturaleza, como la disposición de los dedos de una mano o las manchas de un leopardo. De este modo, el proyecto reúne dos de las fascinaciones de Alan Turing:la informática y la formación de patrones en biología.
Los robots dependen de la mensajería infrarroja para comunicarse con los vecinos dentro de un rango de 10 centímetros. Esto hace que los robots sean similares a las células biológicas, ya que ellos también solo pueden comunicarse directamente con otras células físicamente cercanas a ellos.
El enjambre forma varias formas al reubicar a los robots de áreas con baja concentración de morfógeno a áreas con alta concentración de morfógeno, llamadas 'puntos de Turing, "lo que conduce al crecimiento de protuberancias que se extienden desde el enjambre". Es hermoso ver cómo el enjambre adquiere formas, parece bastante orgánico. Lo fascinante es que no existe un plan maestro, estas formas surgen como resultado de interacciones simples entre los robots. Esto es diferente del trabajo anterior donde las formas a menudo estaban predefinidas, "dice Sabine Hauert.

Los robots utilizados durante los experimentos. La forma de este enjambre en particular es una ilustración de la técnica hecha a mano. Crédito:AAAS
Trabajar con grandes enjambres de robots
Es imposible estudiar el comportamiento del enjambre con solo un par de robots. El equipo utilizó al menos 300 en la mayoría de los experimentos. Trabajar con cientos de pequeños robots es un desafío en sí mismo. Pudieron hacer esto gracias a una configuración especial mediante la cual los experimentos podían detenerse fácilmente, y todos los robots reprogramados a la vez usando luz. Los investigadores realizaron más de 20 experimentos con grandes enjambres, con cada experimento tomando alrededor de tres horas y media.
Es más, al igual que en biología, las cosas salían mal a menudo. Los robots se atascaron o se alejó del enjambre en la dirección equivocada. "Ese es el tipo de cosas que no ocurren en las simulaciones, pero solo cuando haces experimentos en la vida real, "dice Ivica Slavkov, quien comparte primera autoría del trabajo con Daniel Carrillo-Zapata.
Todos estos detalles hicieron que el proyecto fuera un desafío. La primera parte del proyecto se realizó en simulaciones por computadora, y el equipo tardó unos tres años antes de que el verdadero enjambre de robots tomara su primera forma. Pero las limitaciones de los robots también obligaron al equipo a idear ingeniosos mecanismos robustos para orquestar el patrón de enjambre. Inspirándose en la formación de formas en biología, el equipo pudo demostrar que las formas de sus robots podían adaptarse a los daños y la reparación automática. La formación de formas a gran escala del enjambre es mucho más confiable que cada uno de los pequeños robots; el todo es mayor que la suma de las partes.
Si bien los investigadores se inspiraron en la naturaleza para hacer crecer las formas de enjambre, En última instancia, el objetivo es crear grandes enjambres de robots para aplicaciones del mundo real. Imagine cientos o miles de pequeños robots que cambian de formación para adaptarse a un entorno de desastre después de un terremoto o un incendio. o esculpirse en una estructura dinámica en 3D, como un puente temporal, que podría ajustar automáticamente su tamaño y forma para adaptarse a cualquier edificio o terreno. "Debido a que nos inspiramos en la formación de formas biológicas, que se sabe que es autoorganizado y resistente al fracaso, tales enjambres podrían seguir funcionando incluso si algunos robots estuvieran dañados, "dice Daniel Carrillo-Zapata. Sin embargo, aún queda un largo camino por recorrer, antes de que veamos tales enjambres fuera del laboratorio.