Crédito:Chand Gudi et al.
Investigadores del Laboratorio de Investigación de Innovación y Empresas (The Magic Lab) de la Universidad de Tecnología de Sydney han propuesto una nueva arquitectura robótica llamada robótica de niebla (FR). Su enfoque descrito en un artículo publicado previamente en arXiv, aprovecha las ventajas de la computación en la niebla, una estructura informática descentralizada en la que los recursos y los datos se colocan entre su fuente y la nube.
En los próximos años, Es probable que los robots alcancen una adopción generalizada en una variedad de entornos, incluyendo hogares, Centros médicos, y varias industrias. La comunicación activa es un factor clave detrás de la interacción efectiva entre humanos y robots y los investigadores de todo el mundo están tratando de idear nuevas estrategias que podrían mejorar la forma en que los robots se comunican.
La robótica en la nube (CR) permite a los robots realizar cálculos extensos en la nube al compartir mapas, imagenes datos, ocupaciones, potencia de procesamiento y otros recursos en línea. Sin embargo, debido a su gran demanda de datos y tráfico, CR conlleva graves problemas de latencia, particularmente en las interacciones robot-humano.
"La idea de la robótica de niebla me vino a la mente después de ver una alta latencia en la comunicación de un robot, tanto en sus respuestas como en alcanzar su objetivo, "Siva Leela Krishna Chand Gudi, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Nos preguntamos qué podría pasar en un futuro cercano, cuando los robots sirvan en todas partes, ya que es probable que este retraso aumente. Al heredar las características de la computación en la niebla y hacer que la robótica en la nube sea nuestra compañera, introdujimos y acuñamos el término robótica de niebla, primero en la conferencia IROS 2017 ".
El principal objetivo del estudio llevado a cabo por Gudi y sus colegas fue ofrecer resultados sólidos, Interacciones humano-robot fluidas y eficientes con baja latencia. Los investigadores también querían permitir que los robots se comunicaran y colaboraran con los humanos mientras realizaban tareas simultáneamente, compartiendo sus resultados o actividades dentro de la misma familia de robots. Esto, en última instancia, convertiría a los robots en socios que comprenden las necesidades de los humanos con los que interactúan. respondiendo rápida y eficientemente.
Crédito:Chand Gudi et al.
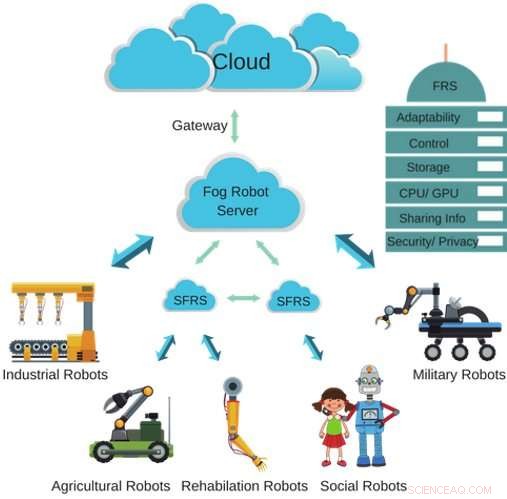
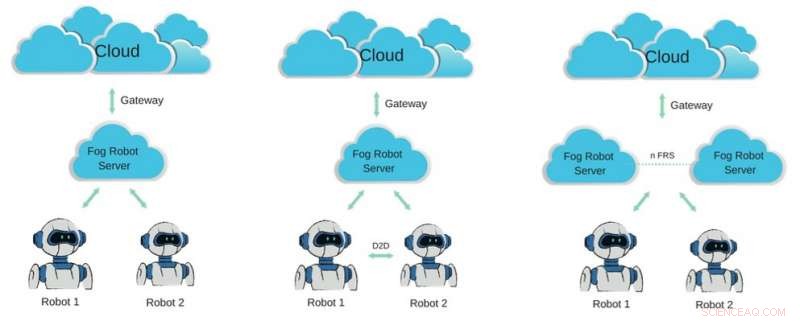
Para abordar los problemas asociados con CR, los investigadores propusieron y definieron una nueva arquitectura robótica denominada niebla robótica (FR), que consta de almacenamiento, funciones de red, e informática descentralizada más cercana a los robots. FR tiene tres componentes principales:el servidor robot sub-fog, el servidor del robot de niebla, y la nube.
Un robot envía una solicitud de información al sistema FR, inicialmente solicitando traspasos al servidor de robot de niebla secundaria. Si este servidor puede abordar eficazmente la solicitud, pasa la información solicitada al robot; si no puede, busca ayuda del servidor del robot de niebla. Si este servidor tampoco puede procesar la solicitud, pide ayuda desde la nube, que normalmente resuelve la solicitud y pasa la información al robot.
Las ventajas de este enfoque incluyen una tasa de respuesta rápida, baja latencia, capacidades informáticas mejoradas, menor consumo de energía, hardware más barato, y menos preocupaciones de seguridad o privacidad. En otras palabras, FR podría conducir a interacciones humano-robot robustas y más rápidas, al mismo tiempo que mejora la duración de la batería del robot.
"Según el retraso promedio recibido por un pimiento de robot social y una configuración de FRS / Cloud, consideramos un valor de latencia, ", Dijo Gudi." Más tarde examinamos nuestras metodologías actuales en una plataforma de simulación, evaluar sus efectos potenciales cuando aumenta el número de robots. Demostramos que FR proporciona baja latencia y podría desempeñar un papel esencial en el futuro, convirtiéndose en una adición a CR ".
En una serie de evaluaciones iniciales, FR logró tasas de respuesta mucho más rápidas que los enfoques CR. Los investigadores creen que podría usarse de forma independiente o integrada con CR, reduciendo la carga en la nube y mejorando la calidad del servicio (QoS).
Crédito:Chand Gudi et al.
"Los seres humanos buscamos la ayuda de los demás cuando necesitamos información, pero los robots se limitan a las tareas para las que están preprogramados, "Explicó Gudi." FR también permite que un robot comparta sus datos con otro robot ".
Para explicar mejor este punto, Gudi ofreció un ejemplo de cómo varios robots podrían ayudar a los humanos dentro de un aeropuerto. En el escenario descrito por él, un viajero le preguntaría a un robot la ubicación de su puerta de salida. El robot guiaría al viajero a la escalera mecánica y luego entregaría la tarea a un segundo robot, que estaría esperando en el otro extremo de la escalera mecánica.
Para reconocerlo cuando se acercan al otro extremo de la escalera mecánica, este segundo robot requeriría información sobre el nombre de la persona, identidad, género y su apariencia. En esta situación, FR permitiría a estos dos robots colaborar en la tarea y comunicarse entre sí, intercambiar rápidamente la información necesaria para completar la tarea.
"Similar, Las técnicas de RF podrían aplicarse en universidades, subterráneos, robots industriales, Y la lista continúa, llegando a diferentes áreas de la robótica, "Dijo Gudi." En última instancia, FR conduce a una sólida interacción humano-robot con baja latencia, al mismo tiempo que protege los datos personales guardándolos dentro del servidor del robot de niebla ".
Los investigadores han llevado a cabo una serie de análisis adicionales, que pronto publicarán en línea. También planean probar la efectividad de FR en RoboCup en Sydney, donde varios robots competirán en la naturaleza.
© 2018 Science X Network