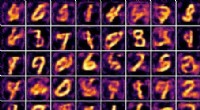
a) Ilustración esquemática de un organismo euglenoide que muestra varios organismos celulares, incluido un flagelo. Imagen adaptada de:IEE Robot. Autom. Letón., doi:10.1109 / LRA.2017.2726113, b) Secuencia de imágenes del movimiento de Eutreptiella spirogyra durante el movimiento euglenoideo. Imágenes reproducidas con permiso de, Richard E. Triemer, el Proyecto Euglenoide. Crédito:RSIF, doi:10.1098 / rsif.2018.0301
La natación es una forma de locomoción empleada por muchos organismos en una amplia gama de escalas en la naturaleza. Los microorganismos con masa pequeña que encuentran el dominio de fuerzas viscosas en el medio requieren un cambio de forma que no varía con el tiempo para lograr una propulsión fluídica alineada con la hidrodinámica. Para superar este desafío, Los flagelados unicelulares de la familia Euglena desarrollaron un movimiento característico conocido como 'movimiento euglenoide' en el que el cuerpo cambia de forma significativamente, permitiendo que el organismo navegue a través de fluidos viscosos y espacios diminutos. Esta capacidad de cambiar la forma del cuerpo y moverse a través de espacios reducidos y entornos desordenados es particularmente atractiva en la ingeniería de robots biomiméticos. Las aplicaciones de ejemplo de robots en miniatura incluyen el movimiento a través de fluidos biológicos durante procedimientos médicos in vivo y la navegación a través de escombros en entornos externos durante las operaciones de búsqueda y rescate de sobrevivientes.
Inspirado por los euglenoides, Krishna Manaswi Digumarti y colaboradores del Departamento de Ingeniería y Matemáticas presentaron el diseño y desarrollo de EuMoBot, un robot blando multisegmentado. El robot biomimético podría reproducir grandes deformaciones corporales para la locomoción. En el estudio, los científicos diseñaron dos robots de diferentes tamaños para operar con un volumen interno constante. El protocolo de ingeniería hizo uso de la hiperelasticidad de las cámaras elastoméricas llenas de líquido para replicar el movimiento de los euglenoides. De los dos, el robot más pequeño se movió a una velocidad de 1/5 de la longitud del cuerpo por ciclo, mientras que el robot más grande se movía a una velocidad de 1/10 de la longitud del cuerpo por ciclo. El estudio mostró cómo se podrían emplear robots biomiméticos blandos para cambiar de forma y replicar el movimiento biológico. al mismo tiempo que actúa como una herramienta para estudiar robots biomiméticos.
Los científicos también presentaron un método cuantitativo basado en descriptores elípticos de Fourier para caracterizar y comparar la forma del robot con su contraparte euglenoide biológica. Los resultados mostraron un 85 por ciento de similitud en la forma, indicando que la técnica de la ingeniería era aplicable para desarrollar robots en miniatura. El método permitió a los científicos comprender la evolución de la forma en formas no lineales, robots blandos dinámicos que no tenían una forma específica para ser modelados. Los resultados del estudio se publican ahora en la Revista de la interfaz de la Royal Society .
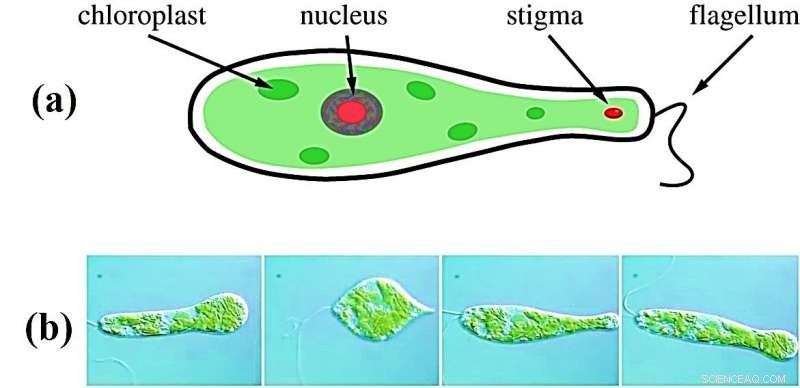
Fabricación del robot blando multisegmento uniendo tres actuadores HEB. a) Molde impreso tridimensional con dos mitades y un núcleo utilizado para moldear el elastómero de silicona. Medio:una sola cámara de actuador. Derecha:un robot de tres segmentos fabricado a dos escalas diferentes. Se muestra un centavo inglés para escala. b) Vista en sección transversal del robot mostrando diferentes cámaras. Cada cámara se suministró con un tubo de entrada y salida. Se proporciona suficiente holgura para permitir la expansión libre de las cámaras. c) Arriba:contorno de las formas celulares durante el movimiento euglenoide. Abajo:el robot blando fabricado que replica la forma euglenoide bioinspirada. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Las estrategias de ingeniería biomimética han inspirado a los investigadores a buscar diseños del reino animal y crear robots inspirados biológicamente. Los euglenoides son flagelados unicelulares, ampliamente estudiados en el laboratorio como modelos debido a su carácter vegetal y animal. Los organismos utilizan estrategias únicas para nadar en números bajos de Reynolds y los estudios sobre su locomoción son relativamente recientes. Las células del organismo suelen estar equipadas con uno o más flagelos para nadar, mientras que también exhibe un segundo tipo de movimiento más lento denominado movimiento euglenoide, en el que la celda sufre un cambio dramático de forma. En el presente estudio, Digumarti y col. utilizó la segunda forma de movimiento para diseñar un suave, robot funcional basado en el comportamiento del microorganismo.
Se desconoce la razón evolutiva del cambio de forma observado durante el movimiento euglenoide. aunque se cree que la deformación en el tamaño de las células surgió en respuesta a fuertes estímulos como la luz, calor, choque químico o contacto. Cuando los microorganismos se colocaron en un laberinto microscópico lleno de líquido que se asemeja a su entorno natural, muchos mostraron movimiento euglenoide, sugiriendo que el movimiento era adecuado para entornos restringidos. El movimiento de esta naturaleza puede ser útil para que un robot bioinspirado en el campo de la robótica suave atraviese entornos desordenados utilizando deformaciones de cuerpos grandes.
En el estudio, los autores presentaron el diseño, principio de actuación y método de fabricación para diseñar EuMoBot, un robot blando que demuestra el movimiento euglenoide. La locomoción a través de un fluido se cuantificó en relación con el movimiento del microorganismo natural. Dado que los mecanismos subyacentes del cambio de forma se estudiaron previamente en detalle, Digumarti y col. se centró en la forma macroscópica del euglenoide en forma robótica sin replicar cambios a nivel microscópico. Para generar actuadores fluídicos suaves, los investigadores diseñaron un dispositivo novedoso similar a un fuelle llamado actuador de "fuelle hiperelástico" (HEB), como se detalló anteriormente por el mismo grupo de investigación.

a) Demostrar la conformidad del robot a medida que se expande entre tornillos rígidos. b) Secuencia de imágenes al inicio y al final de un ciclo de locomoción sobre una mesa plana. c) Robot trepando dentro de una tubería usando un paso tipo gusano de una pulgada. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Los ingenieros formaron la forma del actuador utilizando un molde impreso en 3D. Fabricaron dos robots de diferentes tamaños. Fundieron tres cámaras de actuador, seguido de elastómero mezclado con pigmentos inyectados en el molde para curar durante la noche y formar un recinto blanco translúcido. El robot blando bioinspirado contenía una cámara de inflado / desinflado para replicar la forma euglenoide y lograr similitud en el movimiento.
Para probar la locomoción de los robots diseñados, los investigadores los colocaron en un tanque lleno de una solución de metilcelulosa en agua. Los robots en cada experimento tenían un volumen interno constante, y su fluido interno se movió de una cámara a la siguiente, reproduciendo el movimiento de una onda de expansión característica de los euglenoides. Ambos robots demostraron capacidad para nadar cambiando la forma de su cuerpo. La disparidad de velocidad dependía del volumen de fluido bombeado a través de las cámaras del robot blando. Los científicos observaron la similitud hidrodinámica entre el robot blando y el microorganismo en relación con los números de Reynold en ambos tamaños. El robot blando no se limitó simplemente a trabajar en un entorno fluido como su contraparte biológica, con capacidad de movimiento multimodal sobre una mesa plana y trepando una tubería utilizando un volumen de operación no constante.
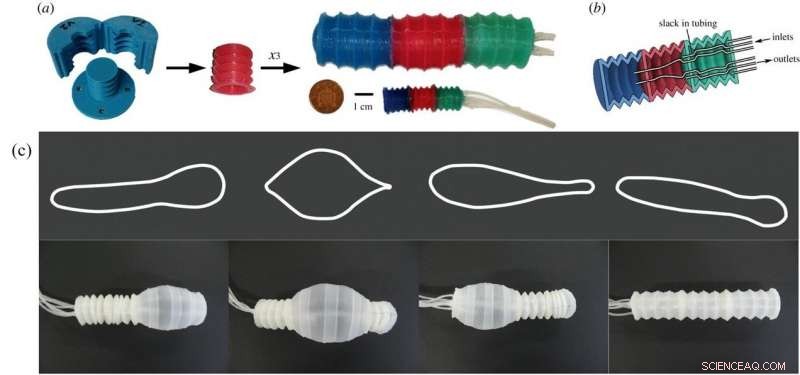
Vista esquemática de la arquitectura de control del robot blando. Se utiliza una cámara para determinar el estado actual del robot. Un script de MATLAB procesa esa información para determinar el estado actual del robot, que incluye expansión y contracción de cada cámara. Luego pasa a través de las señales de control apropiadas a un Arduino, que controla el funcionamiento de bombas y válvulas para dirigir el flujo de fluido dentro del robot. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
El robot emplea un enfoque basado en retroalimentación para el control autónomo, eliminando la necesidad de modelar la dinámica de la bomba y el flujo de fluido dentro del robot. Una estimación de visión artificial del tamaño de la cámara a través de una cámara y un script de MATLAB proporcionó comentarios. El sistema utilizó la expansión y contracción de cada cámara para controlar el flujo de fluido dentro del robot. Los sensores dentro del robot permitieron mediciones directas de la presión del fluido.
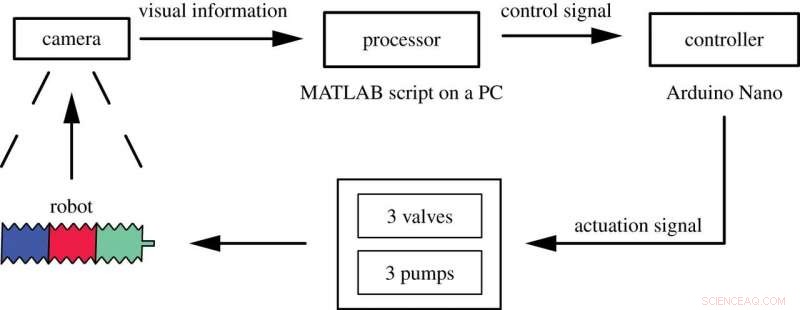
La estimación de la forma del robot se logró con descriptores matemáticos extraídos utilizando grabaciones de video previas del organismo. Los científicos utilizaron el descriptor elíptico de Fourier para contornos cerrados para describir la forma de un robot blando hiperelástico y lo compararon con un organismo biológico por primera vez en el estudio. El descriptor elíptico de Fourier se extrajo en cuatro pasos principales para estimar la forma del objeto. La cantidad de variación en la forma capturada por un vector propio se utilizó para medir cuantitativamente la similitud de forma entre el robot y el organismo. La forma de los euglenoides se caracterizó claramente por los tres primeros componentes principales, mientras que la variación en los robots se extendió a más componentes, lo que sugiere que las formas extremas de los euglenoides no se reprodujeron completamente en los robots.
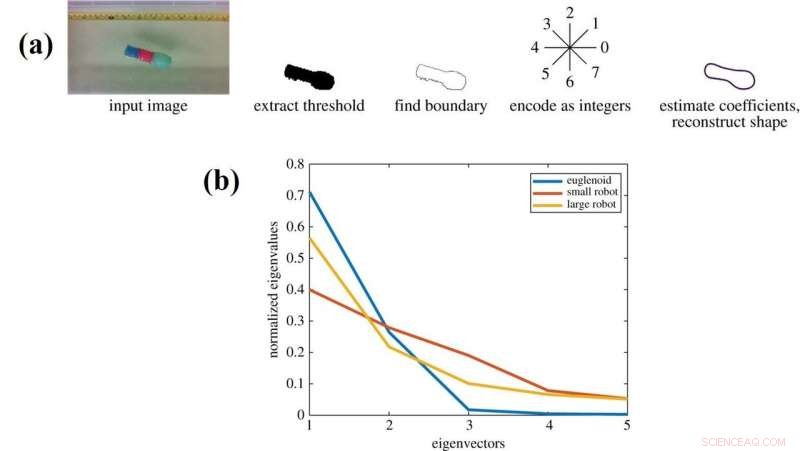
a) Las cuatro etapas de la estimación de la forma. Primero se extrae la región de interés de la imagen. Próximo, se identifica el límite. Este contorno luego se codifica como un conjunto de enteros de Freeman. Finalmente, se calcula un conjunto de coeficientes de Fourier, y forma reconstruida. b) Autovalores normalizados de los primeros cinco autovectores que describen la forma de los robots blandos en comparación con el euglenoide. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Basado en los valores propios, los robots más grandes reproducían formas más cercanas al euglenoide en comparación con los robots más pequeños. La razón de la diferencia observada puede deberse al diseño de los pliegues de los fuelles (fuelles hiperelásticos, HEB). Parámetros de los ángulos de plegado, su número y densidad se pueden optimizar aún más para lograr una mejor replicación de la forma. En comparación con los microorganismos naturales, el robot no produjo un cambio suave al pasar el fluido de una cámara a otra, potencialmente ya que la pared límite sintética a pesar de su elasticidad puede restringir localmente la expansión de la cámara. Esto también puede explicar la incapacidad del robot para asumir formas extremas.
Como un todo, El robot blando multisegmento EuMoBot puede replicar el movimiento euglenoide además de nadar con cambios de forma y locomoción en entornos no fluidos. permitiendo que el robot suave y complaciente opere en espacios reducidos. Se requiere trabajo adicional para comprender la relación entre los componentes principales y la capacidad de locomoción. La extremidad de las formas exhibidas por los EuMoBots fue limitada debido a la resistencia a la tracción del material asociado y su diseño de dispositivo monolítico. Las técnicas de fabricación alternativas, como la impresión 3D y la litografía blanda, podrían abordar los límites de la elasticidad del material. Los robots también podrían diseñarse para parecerse a los euglenoides con precisión matemática al replicar la estructura de película microscópica inherente al organismo para una transición más suave durante la locomoción. La capacidad de dirigir se puede incluir en el diseño del robot con bobinas accionadas de aleación con memoria de forma o usando restricciones en el material con fuentes de energía internalizadas para resiliencia, dispositivos miniaturizados en trabajos futuros.
© 2018 Science X Network