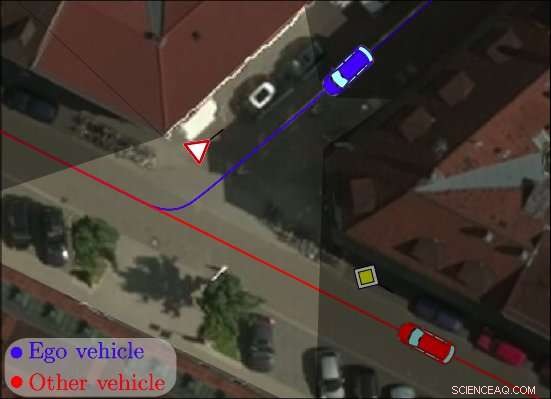
Un escenario de intersección ejemplar que destaca un caso de uso del enfoque propuesto. El vehículo del ego representado en azul a lo largo de este documento, procede a una intersección en la que tiene que ceder. El vehículo tiene visibilidad limitada y un vehículo que se cruza se acerca desde la región ocluida. El planificador del vehículo debe considerar que puede haber un vehículo acercándose y reducir adecuadamente su velocidad. Crédito:Tas &Stiller.
Los investigadores del Centro de Investigación FZI para Tecnología de la Información han desarrollado un nuevo método que podría mejorar la planificación del movimiento de los vehículos autónomos en entornos inciertos o en condiciones de visibilidad limitada. Su papel prepublicado en arXiv, describe una técnica para evitar colisiones en el peor de los casos de evolución de un escenario determinado.
"La conducción automatizada en entornos urbanos y en condiciones adversas es un desafío y sigue estando en la cima de la investigación, "Los investigadores escribieron en su artículo." El clima adverso y las condiciones de luz dan como resultado una percepción de mala calidad al introducir mayores incertidumbres y campos receptivos limitados ".
Los desafíos descritos por los investigadores son quizás incluso de mayor relevancia en entornos urbanos, donde los eventos inesperados hacen que sea más difícil predecir el resultado de una situación. Para abordar estas dificultades, estudios anteriores han intentado desarrollar sistemas de percepción de vanguardia para vehículos automatizados.
Sin embargo, incluso el más avanzado de estos sistemas, equipado con sensores y tecnología de última generación, a menudo luchan para lidiar con la incertidumbre, reduciendo así simplemente el riesgo de colisiones. Para abordar este problema, los investigadores de FZI se centraron en la planificación del movimiento en un entorno incierto con oclusiones.
"En este documento analizamos las incertidumbres a las que está sujeto un vehículo automatizado, ", explicaron los investigadores." Estudiamos diferentes situaciones de tráfico desafiantes para un vehículo con un campo receptivo limitado ".
Después de estudiar las condiciones en las que un planificador de movimiento debe considerar los vehículos que se aproximan desde regiones que no son visibles, los investigadores idearon un enfoque para detectar rápidamente los comportamientos que no cumplen. Su enfoque imita de alguna manera la forma en que los conductores humanos normalmente se acercan a las intersecciones, conducir con más precaución y a velocidad reducida.
"Presentamos un método para permanecer libre de colisiones durante la peor evolución de la escena dada, ", escribieron los investigadores." Definimos criterios que miden los márgenes disponibles para una colisión mientras consideramos la visibilidad y las interacciones y, en consecuencia, integramos las condiciones que aplican estos criterios en un planificador de movimiento basado en la optimización ".
Los investigadores evaluaron su método en un entorno de simulación de circuito cerrado y descubrieron que se generalizaba bien en varios escenarios urbanos diferentes. Su enfoque ahora se ha integrado en un vehículo automatizado, llamado BERTHAONE.
"Nuestro trabajo futuro abordará escenarios más complejos, donde están disponibles una multitud de rutas y opciones de maniobra, como cambios de carril, "escribieron los investigadores.
© 2018 Science X Network