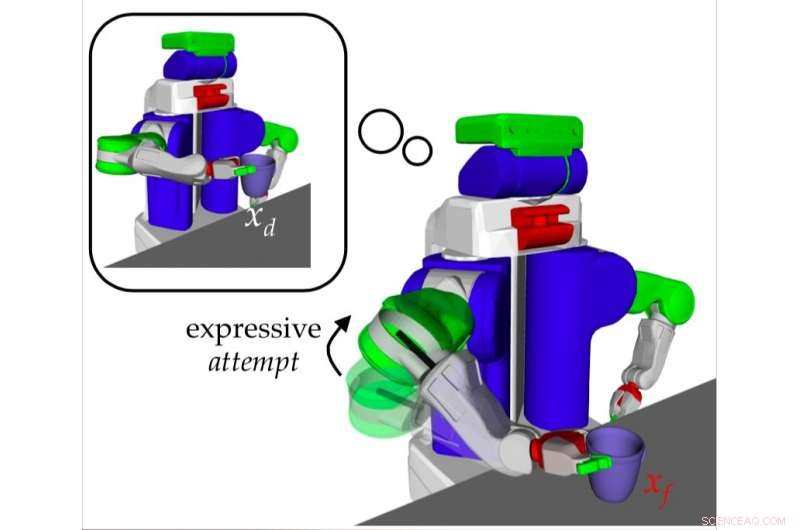
El método ideado por los investigadores genera un movimiento de intento destinado a parecerse a una ejecución exitosa (por ejemplo, moviendo el efector final de xf a xd) mientras obedece las restricciones sobre las limitaciones del robot. En este ejemplo, levanta el codo para comunicar que está intentando levantar la copa, pero la copa es demasiado pesada para levantarla. Crédito:Kwon, Huang y Dragan.
Investigadores de la Universidad de Cornell y la Universidad de California, Berkeley, han desarrollado un método para generar automáticamente movimientos con los que los robots pueden expresar su incapacidad para completar una tarea determinada. Estos movimientos generados comunican claramente qué tarea no puede completar el robot y por qué no puede completarla.
"Al interactuar con robots, Es importante que los humanos tengan expectativas precisas sobre las capacidades del robot. "Minae Kwon, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Una forma de establecer expectativas precisas es comprender qué son incapaces de hacer los robots y por qué".
En la actualidad, la mayoría de las fallas de los robots son extremadamente poco informativas. En otras palabras, cuando el robot no puede completar una tarea, podría detenerse abruptamente en medio de una acción o incluso negarse a comenzar la tarea en primer lugar. Esto dificulta que los humanos comprendan la causa de la falla del robot, así como generalizar sus habilidades.
"Queríamos encontrar una forma en la que los robots pudieran comunicar de manera más inteligente sus incapacidades (es decir, qué están tratando de hacer y por qué fallará) incluso antes de que ocurra una falla, "Dijo Kwon." Específicamente, nos centramos en las discapacidades relacionadas con las tareas de planificación del movimiento (por ejemplo, levantar una taza, empujando una puerta), ya que queríamos resolver este problema mediante el movimiento expresivo ".
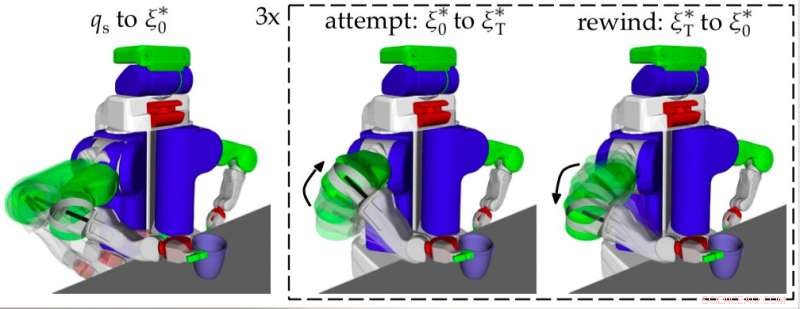
Para una tarea incompleta dada, el robot primero ejecuta la tarea hasta el punto de falla (izquierda), en cuyo punto ejecuta la trayectoria de intento ξ ∗ (centro). Para enfatizar este movimiento, el robot luego ejecuta el reverso de ξ ∗ para rebobinar de nuevo a ξ ∗ 0 (derecha), y repite esto dos veces más. Crédito:Kwon, Huang y Dragan.
Kwon, sus colegas Sandy Huang y su asesora Anca Dragan abordaron este problema en el contexto de la optimización de la trayectoria. Su enfoque minimiza la similitud entre el movimiento que expresa incapacidad y lo que permitiría al robot ejecutar con éxito la tarea. considerando también las limitaciones físicas del robot. Cuando los investigadores evaluaron diferentes medidas de similitud, encontraron que uno en particular se generalizaba bien a una amplia gama de tareas, producir movimientos expresivos que se adaptan a las tareas individuales.
"Generamos un movimiento de intento, o un movimiento en el que el robot hace todo lo posible para completar la trayectoria que habría seguido, que está sujeto a una restricción, "Explicó Kwon." Seguir la trayectoria deseada ilustra el objetivo del robot y la restricción ilustra la falla. Para comunicar la incapacidad, rebobinamos y repetimos consecutivamente estos movimientos de intento ".
El método empleado por los investigadores genera automáticamente movimientos que expresan la incapacidad del robot, comunicando tanto lo que está tratando de lograr como las razones detrás de su fracaso. En última instancia, esto podría mejorar la comunicación entre los usuarios finales y los robots, facilitando su colaboración en una amplia gama de tareas.
"Creemos que es importante que las personas no solo puedan reconocer el objetivo previsto del robot y la causa de la incapacidad con mayor claridad en comparación con otros enfoques, pero que nuestros movimientos también crearon una imagen positiva del robot, Dijo Kwon. "Por ejemplo, la gente estaba más dispuesta a ayudar al robot y colaborar con él. Esperamos que estas implicaciones positivas para la colaboración humano-robot ayuden a mejorar la forma en que interactuamos con los robots ".
En el futuro, el método desarrollado por Kwon, Huang y Dragan podrían ayudar al desarrollo de robots más comunicativos, mejorar aún más las interacciones entre humanos y máquinas. Los investigadores ahora planean desarrollar aún más su enfoque, con el fin de generar movimientos para una variedad más amplia de fallas de tareas.
"Solo hemos apuntado a un subconjunto de posibles incapacidades que puede tener el robot, dejando de lado otros tipos de fallos, como fallas de percepción, ", Dijo Kwon." Encontrar formas creativas de expresar diferentes tipos de incapacidades es un desafío interesante que dejamos para el trabajo futuro ".
© 2018 Science X Network