Crédito:Petit et al.
Los investigadores de la Ecole Centrale de Lyon han ideado recientemente un nuevo marco de desarrollo inspirado en la memoria a largo plazo y los mecanismos de razonamiento de los seres humanos. Este marco, descrito en un artículo presentado en IEEE ICDL-Epirob en Tokio y prepublicado en arXiv, permite a los robots optimizar de forma autónoma los hiperparámetros ajustados desde cualquier módulo de acción y / o visión, que se tratan como una caja negra.
En años recientes, los investigadores han construido robots que pueden completar una variedad de tareas. Sin embargo, el entorno en el que operan estos robots suele estar algo limitado. Esto se debe a que en robótica, La mayoría de los algoritmos están diseñados y optimizados manualmente por expertos humanos para anticipar los desafíos potenciales que el robot podría encontrar en una situación determinada.
"Sin embargo, cuando se trata de incertidumbres, por ejemplo, cuando el robot tendrá que lidiar con nuevos objetos con frecuencia durante su vida útil, confiar siempre en programas adicionales y la optimización de ingenieros humanos no es viable:el robot tiene que aprender por sí mismo, "Dr. Maxime Petit, uno de los investigadores que realizó el estudio, dijo a TechXplore. “Queremos dotar a los robots de mecanismos de aprendizaje para que sean autónomos y se adapten a diversas situaciones, incluso cuando no se anticipan ".
El desarrollo de robots que se adapten automáticamente a diferentes situaciones podría tener una serie de aplicaciones útiles, por ejemplo, en el contexto de la robótica industrial, donde los brazos robóticos necesitan recoger objetos desconocidos de bultos homogéneos.
Crédito:Petit et al.
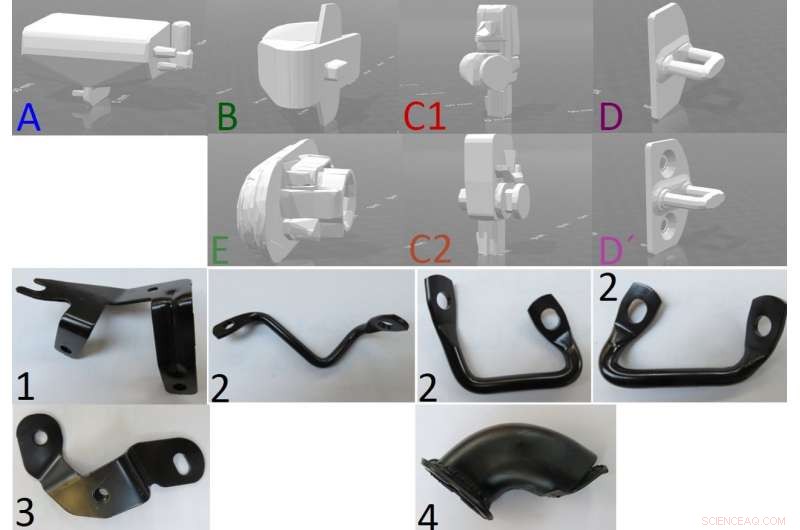
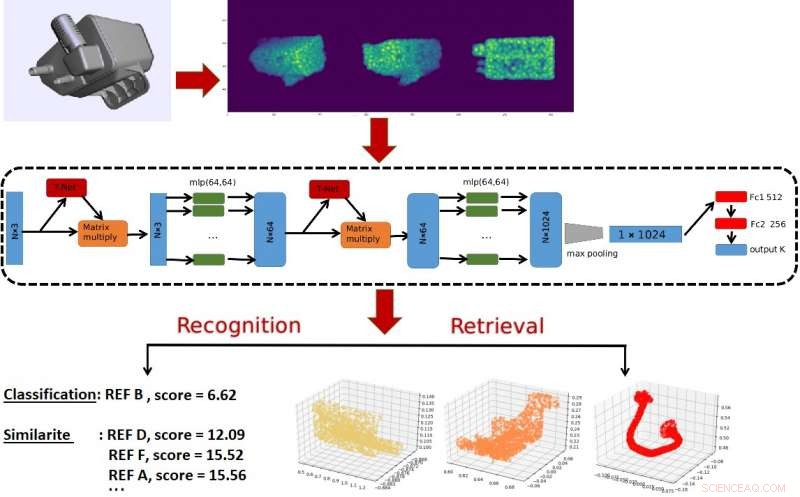
"Queríamos que el robot optimizara de forma autónoma los parámetros de un software de agarre basado en la visión (Kamido de Siléane) para cada objeto en menos de unas pocas horas, "Petit explicó." Para hacerlo, utilizamos un marco de desarrollo que tiene como objetivo replicar cómo los niños aprenden sobre el mundo. En particular, queremos aprovechar la similitud entre objetos para acelerar el proceso de aprendizaje transfiriendo el conocimiento de una tarea a otra similar ”.
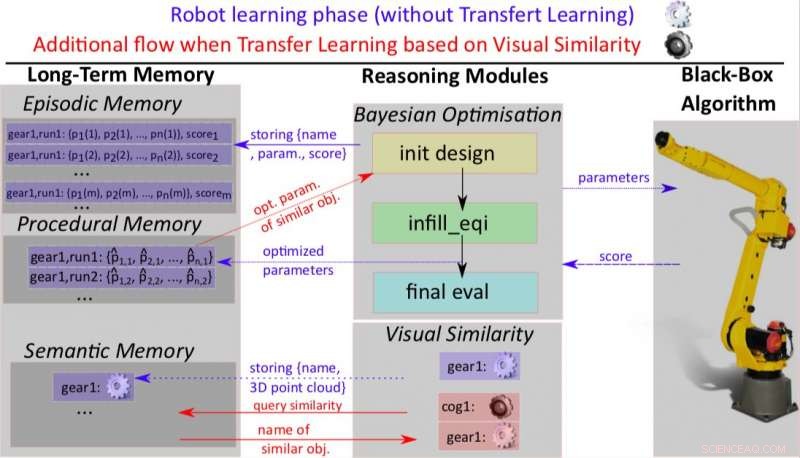
El marco de desarrollo presentado por Petit y sus colegas tiene como objetivo permitir el aprendizaje abierto y de por vida de nuevas habilidades en robots a través de un proceso similar al observado en niños humanos. Para lograr esto, su marco incluye una memoria a largo plazo en la que los robots almacenan sus experiencias, así como capacidades de razonamiento que les permitan identificar elementos útiles en sus datos almacenados.
"El método de optimización bayesiano funciona como una estrategia inteligente de 'prueba y error':el robot estima qué conjunto de parámetros es mejor evaluar en función de los resultados de la evaluación anterior, "Petit explicó." En resumen, este método guía eficientemente al robot en la exploración de parámetros en torno a valores que no se probaron, sino también hacia valores que tienen un alto potencial ".
A pesar de la eficacia de esta técnica, los investigadores querían aumentar la convergencia del aprendizaje del robot para lograr una mejor optimización. Por tanto, los métodos tradicionales de optimización bayesiana no eran deseables, como con estos, El aprendizaje del robot comienza desde cero para cada nuevo objeto que encuentra. Para abordar esta limitación, los investigadores emplearon una estrategia basada en la similitud de visión.
Crédito:Petit et al.
"Queríamos aprovechar la experiencia previa del robot para tareas diferentes pero similares, Petit dijo. cuando se enfrenta a un nuevo objeto, Obligamos al robot a explorar inicialmente soluciones optimizadas para objetos similares. Por ejemplo, si el robot sabe coger una naranja y ahora tiene que coger una manzana, Obligamos al robot a agarrar la manzana usando la estrategia de 'agarrar la naranja'. Lo hacemos preguntando al módulo de similitud visual qué objetos son similares a los nuevos, y extraer las mejores soluciones para estos objetos similares de la memoria a largo plazo ".
Los investigadores evaluaron su marco dentro de un entorno de simulación. Descubrieron que la estrategia de aprendizaje por transferencia basada en la similitud visual era mucho más beneficiosa que el aprendizaje amnésico, en el que los robots aprenden estrategias desde cero cada vez que realizan una nueva tarea.
Hasta aquí, Los marcos de desarrollo se han investigado principalmente en el contexto de la robótica social, por ejemplo, ayudando a personalizar la asistencia de robots sociales a las necesidades o preferencias de sus usuarios.
"El uso de este marco en una configuración de robótica industrial condujo a resultados convincentes, lo que implica que los campos de la robótica social e industrial tienen mucho que aprender unos de otros, ", Dijo Petit." Otro aspecto interesante de nuestro estudio es que el marco está optimizando un algoritmo de "caja negra", lo que significa que no sabemos nada sobre cómo está funcionando. Le proporcionamos parámetros, y a cambio, recibimos una puntuación por su calidad. Esto significa que también podría aplicarse a diferentes aplicaciones y algoritmos (incluso fuera del campo de la robótica) que necesitan ajustes precisos frecuentes ".

Robot Kamido de Siléane
Los investigadores ahora están explorando formas en las que los robots podrían transferir el conocimiento sobre los objetos adquiridos durante las simulaciones a tareas reales que involucren los mismos objetos. Esto mejoraría aún más la eficiencia de un robot, permitiéndole aprender cosas nuevas virtualmente y luego aplicarlas en la vida real.
"La optimización de parámetros para objetos que comparten propiedades físicas también podría conducir a la aparición de este concepto para robots específicos, "Añadió Petit." Por ejemplo, un robot podría aprender que un 'plano, ' 'pesado, ' 'largo, 'etc., el objeto debe captarse con valores específicos para un subconjunto de parámetros. Esto se puede utilizar para mejorar las interacciones entre humanos y robots y el aprendizaje mediante el lenguaje natural. por ejemplo, con los trabajadores ayudando al robot proporcionando una pequeña descripción de los nuevos objetos que se manipularán ".
© 2018 Tech Xplore