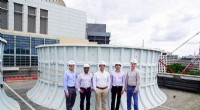
La investigación encuentra que los robots, como este en el laboratorio de Stefanie Tellex de Brown, se puede acceder a través de Internet a menos que los investigadores tomen medidas para bloquearlos. Crédito:Nick Dentamaro
Los investigadores de robótica no soñarían con dejar la puerta abierta cuando salgan del laboratorio por la noche, pero un nuevo estudio muestra que los robots de investigación a menudo quedan expuestos de otra manera:sin seguridad en Internet.
Un equipo de investigadores de la Universidad de Brown realizó recientemente un escaneo mundial en busca de hosts que ejecuten el Sistema Operativo Robot (ROS), una plataforma de robótica de investigación popular. Durante las exploraciones, que se realizaron en tres períodos diferentes en 2017 y 2018, encontraron hasta 100 sistemas expuestos que ejecutan ROS, hasta 19 de los cuales se consideraron robots en pleno funcionamiento. Los investigadores demostraron que es posible controlar estos robots de forma remota:espiar las imágenes de las cámaras e incluso enviar comandos para mover los robots.
"Aunque algunos robots no seguros pueden no parecer un problema crítico, Nuestro estudio ha demostrado que varios robots de investigación son accesibles y controlables desde la Internet pública, "escribe el equipo de investigación." Es probable que estos robots puedan ser accionados de forma remota de formas [que son] peligrosas tanto para el robot como para los operadores humanos ".
Los hallazgos son un recordatorio, los investigadores dicen, que todos deben tener en cuenta la seguridad en un mundo digital cada vez más conectado.
La investigación se presentó en junio como parte del Taller de Robótica Adversaria en la conferencia "2018 Robótica:Ciencia y Sistemas" en Pittsburgh.
ROS es la plataforma dominante utilizada en robótica de investigación. Se puede considerar como el sistema nervioso central de un robot. La plataforma agrega todos los componentes de un robot:sus cámaras, sensores y actuadores, y los vincula a un nodo informático central. A través de una computadora externa y una conexión de red, un operador se conecta al nodo central para dar órdenes al robot.
"ROS es una gran herramienta para la investigación en robótica, pero los diseñadores dejaron explícitamente la seguridad a los usuarios finales, "dijo Stefanie Tellex, roboticista en Brown y coautor del estudio. "No requiere autenticación para conectarse a un maestro ROS, lo que significa que si está ejecutando ROS y no está detrás de un firewall, cualquiera puede conectarse a su robot ".
Eso hizo que Tellex y su colega de robótica de Brown, George Konidaris, se preguntaran cuántos robots que ejecutan ROS podrían estar disponibles a través de Internet. Descubrir, se dirigieron a otros dos colegas de Brown, el experto en seguridad Vasileios Kemerlis y el experto en redes Rodrigo Fonseca.
"Nuestro grupo tiene la capacidad de realizar básicamente un escaneo mundial de Internet, ", Dijo Fonseca." Así que comenzamos a pensar en formas en las que podríamos buscar dispositivos ROS de una manera que no fuera disruptiva, pero nos daría una idea de lo que hay ahí fuera ".

“Estos robots pueden potencialmente moverse de formas que pongan en peligro al robot, así como a las personas que operan el robot. ”- Stefanie Tellex, roboticista de la Universidad de Brown. Crédito:Mike Cohea
Nicholas DeMarinis, un estudiante de posgrado que trabaja con Fonseca, dirigió el procedimiento de escaneo. Los investigadores enviaron consultas a más de cuatro mil millones de direcciones IP en todo el mundo, buscando programas que se ejecuten en el puerto TCP (protocolo de comunicación de transferencia) que normalmente usa ROS. Una vez que tuvieron una lista de direcciones IP que respondieron en ese puerto, enviaron comandos ROS pasivos para determinar si el programa en el otro extremo era realmente ROS.
Los investigadores realizaron el escaneo en tres ocasiones diferentes y encontraron alrededor de 100 sistemas expuestos que ejecutan ROS. Dado que ROS también se utiliza para robots virtuales en entornos simulados y otras aplicaciones que no son necesariamente robots completos, los investigadores observaron cada instancia de ROS para determinar cuáles eran probablemente robots reales. Encontraron 19 robots en su primer escaneo y alrededor de una docena cada uno en los siguientes dos escaneos. El equipo se puso en contacto con los propietarios de todos los robots detectados y otras instancias de ROS para informar a los investigadores y administradores de red que sus sistemas estaban expuestos.
Uno de los robots detectados resultó estar en el laboratorio de uno de los colaboradores de Tellex, Siddhartha Srinivasa, profesor de informática en la Universidad de Washington. Para averiguar si realmente era posible tomar el control de un robot de forma remota, Tellex se puso en contacto con Srinivasa y le pidió a su equipo que dejara algunas de las funciones del robot en línea para una prueba. Tellex demostró que de hecho podía acceder a la cámara del robot, mueva su cuello e incluso haga que el robot hable usando una función de voz ROS.
Ese tipo de acceso puede ser peligroso dicen los investigadores.
"Estos robots pueden potencialmente moverse de formas que pongan en peligro al robot, así como a las personas que operan el robot, "Dijo Tellex.
"Este es un trabajo muy oportuno e importante de Stefanie y su equipo, y nos sentimos honrados de colaborar, ", Dijo Srinivasa." Como científicos, Estamos profundamente comprometidos con comprender y mitigar los riesgos de seguridad de las tecnologías emergentes que creamos. En U.W., hemos estado trabajando junto con expertos en seguridad para crear inteligencia artificial segura, y este trabajo enfatiza aún más la necesidad de tales colaboraciones interdisciplinarias ".
Los investigadores dicen que realizaron el estudio para no señalar con el dedo a ningún laboratorio individual, pero para subrayar el hecho de que los agujeros de seguridad en ROS pueden pasarse por alto fácilmente. De hecho, uno de los robots encontrados durante los escaneos estaba en el propio laboratorio de Tellex. Lo habían puesto en Internet para una demostración externa y simplemente se olvidaron de volver a bloquearlo.
La buena noticia es que asegurar estos robots no es particularmente difícil. Solo necesitan ejecutarse detrás de un firewall o en una red privada virtual. Pero eso requiere que los usuarios sean conscientes de la seguridad, y los investigadores esperan que este estudio anime a las personas a ser precisamente eso. También esperan que el trabajo pueda alentar a los servicios de monitoreo de seguridad como Shodan a comenzar a hacer sus propios escaneos para ROS.
"Cuando tiene software escrito sin la seguridad en mente junto con personas que no piensan en la seguridad, esa es una combinación peligrosa, ", Dijo Fonseca." Podemos pensar en esto en el contexto más amplio de Internet de las cosas, donde debemos pensar en la seguridad en todas las etapas de un producto, desde el ciclo de desarrollo y actualización hasta la forma en que los usuarios implementan los dispositivos ".