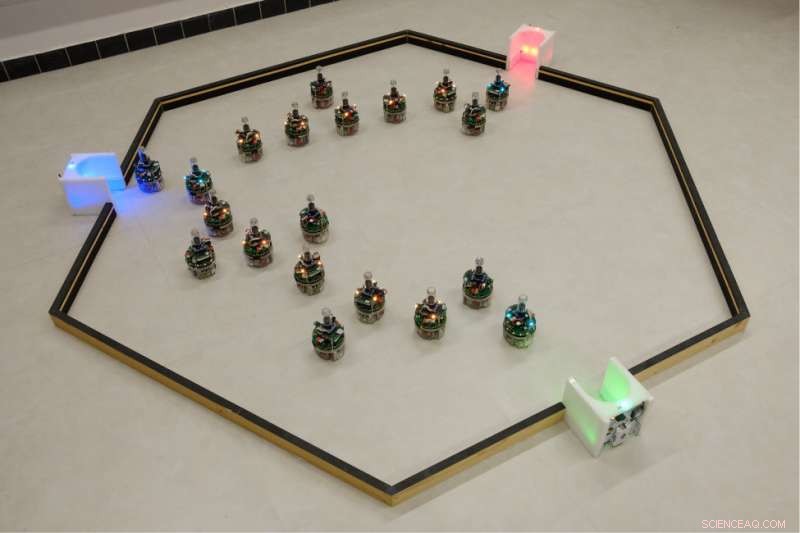
TS-Swarm en su arena con tres cabinas. Crédito:Garattoni y Birattari, Sci. Robot. 3, eaat0430 (2018)
¿Podrán los robots ayudar pronto a los equipos de rescate a salvar a los supervivientes de un desastre natural? Tal misión requeriría que los robots pudieran determinar, en su propia, qué tareas realizar y en qué orden realizarlas; por ejemplo, De nada sirve intentar sacar a una víctima de los escombros si los escombros aún no se han limpiado. En la actualidad, los ingenieros son responsables de programar la secuencia de acciones. ¡Pero esto podría cambiar pronto!
Mauro Birattari y Lorenzo Garattoni, investigadores del laboratorio IRIDIA (Escuela de Ingeniería de Bruselas, Université Libre de Bruxelles), Recientemente han demostrado que los robots pueden decidir colectivamente en qué orden deben completar sus tareas. Los resultados de su investigación se publican en Ciencia Robótica este miercoles, 18 de julio.
Los investigadores del laboratorio IRIDIA han basado su estudio en la robótica de enjambres, una rama de la robótica que se basa en el comportamiento colectivo y organizado de animales sociales (como las hormigas) para crear grupos de robots que exhiben inteligencia artificial. Actualmente, los robots son capaces de comunicarse y coordinarse para tomar decisiones y realizar tareas sencillas, como mover un objeto o elegir uno de dos caminos. Para su última investigación, Mauro Birattari y Lorenzo Garattoni han dado un paso más en términos de complejidad:han creado un enjambre de robots que es capaz de realizar una secuencia de tres acciones, sin conocer el orden correcto de antemano. En la práctica, los robots debían moverse a tres puntos diferentes en el espacio, donde iban a realizar una tarea sencilla. Solo después de que se completaran las tareas, los robots sabrían si el orden era correcto. Para solucionar este problema, algunos de los robots forman gradualmente una cadena entre los tres puntos en el espacio, que los demás utilizan como guía mientras prueban las distintas combinaciones posibles siguiendo las instrucciones de los robots que componen la cadena (ver foto). Finalmente, ellos determinan la secuencia correcta trabajando juntos.
Este estudio demuestra, por primera vez, que los robots son capaces de determinar colectivamente una secuencia de acciones cuyo orden requerido era previamente desconocido. Esta capacidad de planificar con anticipación se considera una habilidad cognitiva compleja, y surge de las interacciones entre los individuos del grupo:juntos, los robots pueden planificar una secuencia de acciones, lo que ningún individuo del grupo podría hacer solo.
Esta investigación allana el camino para una serie de aplicaciones potenciales que involucran a un grupo de robots 'inteligentes', es decir, robots que pueden resolver problemas por sí mismos. Las posibilidades que anticipan los investigadores incluyen la búsqueda de sobrevivientes después de un desastre natural, explorar entornos desconocidos u hostiles, construcción de estructuras en sitios peligrosos, y diversas aplicaciones en agricultura. La capacidad, demostrada en este estudio, para determinar de forma autónoma el orden en que deben completarse las tareas es fundamental para este tipo de misiones.
Mauro Birattari ha sido galardonado con una ERC Consolidator Grant. Esta investigación fue liderada para el proyecto ERC "DEMIURGE:diseño automático de enjambres de robots".