Un famoso video viral sobre el DARPA Robotics Challenge muestra todo tipo de robots humanoides cayendo torpemente. El movimiento bípedo es bastante inestable, que no es solo un problema para un robot que intenta completar su tarea, pero también porque la caída puede dañar una pieza de maquinaria muy cara.
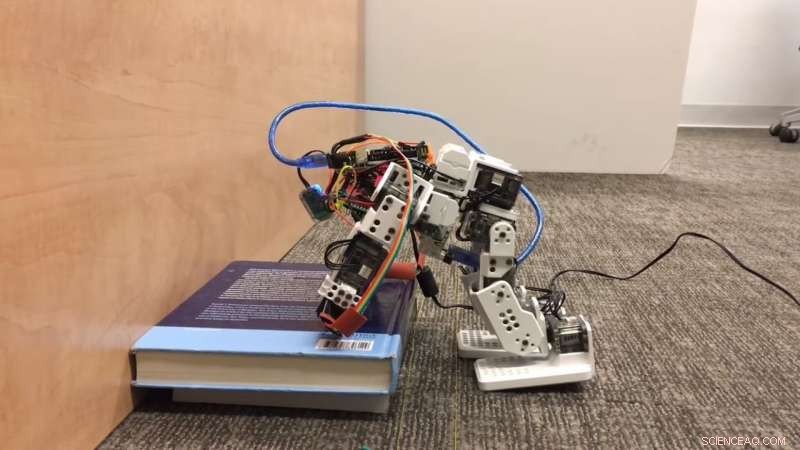
Los especialistas en robótica de todo el mundo están abordando este problema de muchas formas. Mientras que algunos buscan agregar una serie de pasos correctivos después de que un robot pierde el equilibrio, como una persona que tropieza después de tropezar, Kris Hauser quiere que los robots puedan utilizar el entorno que los rodea.
"Si empujan a una persona hacia una pared o un riel, podrán usar esa superficie para mantenerse erguidos con las manos. Queremos que los robots puedan hacer lo mismo, "dijo Kris Hauser, profesor asociado de ingeniería eléctrica e informática y de ingeniería mecánica y ciencia de los materiales en Duke. "Creemos que somos el único grupo de investigación que trabaja para que un robot elija dinámicamente dónde colocar sus manos para evitar caídas".
Si bien tales decisiones y acciones son una segunda naturaleza para nosotros, programarlos en los reflejos de un robot es engañosamente difícil. Para agilizar el proceso y ahorrar tiempo de cálculo, Hauser programa el software para que se concentre únicamente en las articulaciones de la cadera y el hombro del robot.
Mientras el robot no gire al caer, esto crea solo tres ángulos que el algoritmo de estabilización debe tener en cuenta:el pie hasta la cadera, la cadera al hombro, y el hombro a la mano. El robot debe identificar las superficies cercanas a su alcance y luego calcular rápidamente la mejor combinación de ángulos para atraparlo. La solución final minimiza el impacto cuando las manos del robot hacen contacto, y también minimiza la posibilidad de que sus manos o pies resbalen. El algoritmo toma su mejor conjetura y luego lo optimiza progresivamente utilizando un método llamado disparo directo.
En su estado actual, el robot tiene información sobre su entorno y no puede navegar por sí mismo. Pero en un futuro cercano, Hauser planea actualizarse a un robot más grande con sus propios sensores de cámara para que pueda ver su entorno.
"Con suerte, para fin de año deberíamos estar haciendo experimentos con el robot trabajando en una carrera de obstáculos en vivo, ", Dijo Hauser." Entonces intentaremos que el robot mapee dinámicamente lo que lo rodea y razone sobre cómo protegerse de caídas en entornos arbitrarios ".