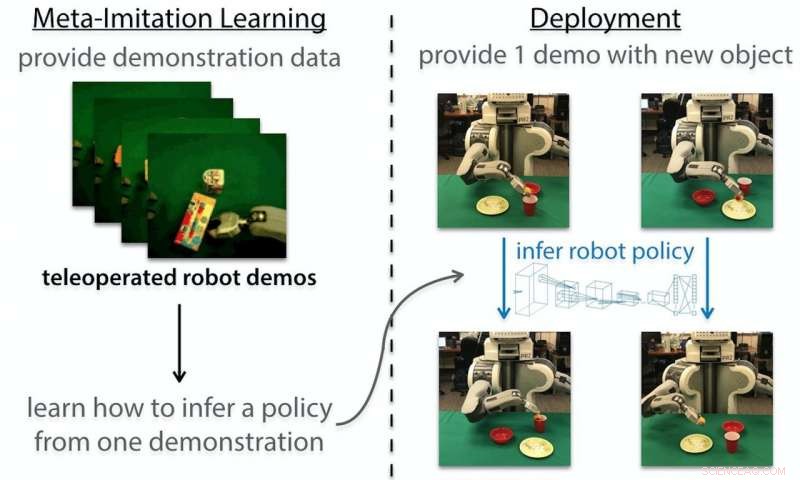
Tres pasos para nuestro algoritmo de metaaprendizaje. Crédito:Tianhe Yu y Chelsea Finn
Un equipo de investigadores de UC Berkeley ha encontrado una manera de hacer que un robot imite una actividad que ve en una pantalla de video solo una vez. En un documento que han subido al arXiv servidor de preimpresión, el equipo describe el enfoque que utilizaron y cómo funciona.
Los robots que aprenden a hacer cosas simplemente observando a un humano realizar una acción una sola vez serían capaces de aprender muchas más acciones nuevas mucho más rápido de lo que ahora es posible. Los científicos han estado trabajando duro para descubrir cómo hacer que esto suceda.
Aunque históricamente, Los robots han sido programados para realizar acciones como recoger un objeto mediante un código que establece expresamente qué se debe hacer y cómo. Así es como funcionan la mayoría de los robots que hacen cosas como montar coches en una fábrica. Dichos robots aún deben someterse a un proceso de capacitación mediante el cual son guiados a través de procedimientos varias veces hasta que sean capaces de realizarlos sin cometer errores. Más recientemente, Los robots han sido programados para aprender puramente a través de la observación, al igual que lo hacen los humanos y otros animales. Pero ese aprendizaje imitativo normalmente requiere miles de observaciones. En este nuevo esfuerzo, los investigadores describen una técnica que han desarrollado que permite a un robot realizar una acción deseada observando a un ser humano hacerlo una sola vez.
Para lograr esta hazaña, los investigadores combinaron el aprendizaje por imitación con un algoritmo de metaaprendizaje. El resultado es algo que ellos llaman metaaprendizaje independiente del modelo (MAML). Metaaprendizaje, los investigadores explican, es un proceso mediante el cual un robot aprende incorporando experiencia previa. Si a un robot se le muestra un video de un humano recogiendo una pera u otro objeto similar, por ejemplo, y poniéndolo en una taza, cuenco u otro objeto, puede "sentir" un objetivo. Si en cada instancia se le enseña a imitar el comportamiento de cierta manera, luego "aprende" qué hacer cuando observa otros comportamientos similares. Por lo tanto, cuando ve un video de una persona que toma una ciruela y la pone en un tazón, reconoce el comportamiento y es capaz de traducirlo en un comportamiento similar propio, que luego puede llevar a cabo.
© 2018 Tech Xplore