En los últimos años, con el aumento significativo de las actividades de lanzamiento espacial, el número de naves espaciales desorbitadas ha aumentado considerablemente, lo que plantea un grave impacto tanto para las naves espaciales en órbita activa como para las actividades espaciales futuras. Los sistemas tradicionales de captura con redes de cuerda, que sirven como tecnología para desorbitar activamente naves espaciales, tienen un gran potencial para mitigar y limpiar los desechos espaciales.
Sin embargo, los sistemas de cuerdas enfrentan desafíos como la dificultad para mantener la forma durante períodos prolongados, la susceptibilidad a autoenredarse, las pérdidas de energía y una reducción en el área de captura efectiva. Por el contrario, las películas delgadas pueden plegarse y desplegarse siguiendo formas regulares, lo que ofrece mayor flexibilidad y confiabilidad en comparación con las ataduras. Surgen como una solución eficaz al problema de los entrelazamientos y presentan un método prometedor para la mitigación y eliminación de desechos espaciales.
En un artículo de revisión publicado recientemente en Space:Science &Technology , el equipo del profesor Wei Cheng en el Instituto de Tecnología de Harbin, en colaboración con investigadores del Instituto de Ingeniería de Control de Beijing y la Universidad Benha, ha diseñado un sistema de bolsillo de captura de película delgada.
Sin embargo, la estructura flexible de este sistema es propensa a deformaciones y vibraciones significativas durante el movimiento, lo que resulta en una interferencia considerable con las operaciones de la nave espacial. Para analizar cuantitativamente estas perturbaciones, este estudio se centra en el modelado dinámico y el control de actitud del sistema de captura de bolsillo de película delgada.
La investigación implica el desarrollo de un controlador de modo deslizante terminal no singular rápido (FNTSM) y un observador de dilatación de tiempo fijo (FxESO) integrados en una ley de control de seguimiento de actitud. La eficacia del controlador se valida mediante el establecimiento de un prototipo virtual. Esta investigación proporciona apoyo teórico para la futura aplicación en órbita del sistema.
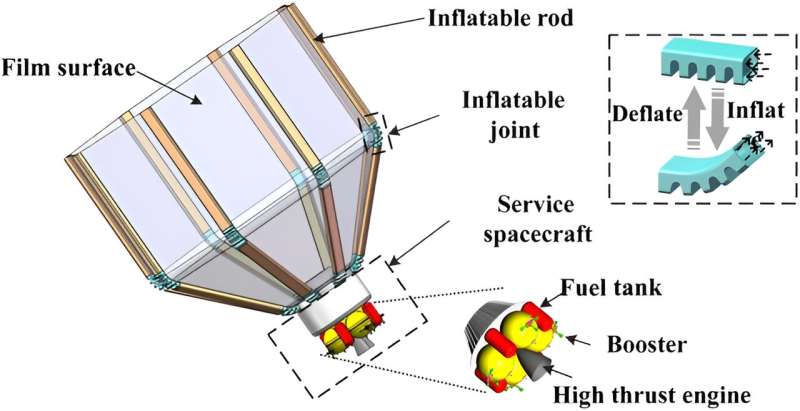
En primer lugar, establecer el modelo del sistema de bolsillo de captura. Utilizando una gran estructura de membrana flexible sostenida por varillas inflables, la parte superior forma un prisma octogonal, proporcionando una gran envoltura para el mecanismo de captura, mientras que la parte inferior adquiere una forma cilíndrica.
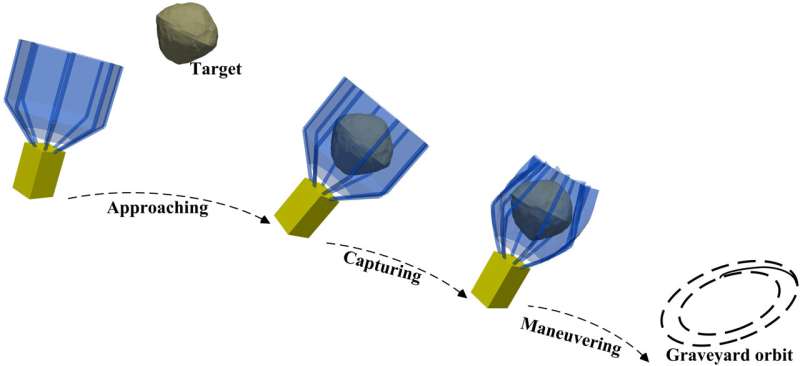
El despliegue y retracción del sistema se logra mediante el ajuste de inflación y desinflación mediante juntas flexibles inflables. El proceso de trabajo del sistema se divide principalmente en 3 etapas. En primer lugar, el sistema de la nave espacial es impulsado por un motor de alto empuje para acercarse al objetivo capturado. Luego, se inflan juntas flexibles inflables para envolver al objetivo. Finalmente, la nave espacial de servicio maniobra activamente para arrastrar al objetivo capturado a la órbita del cementerio.
A continuación, utilice la formulación de coordenadas nodales absolutas (ANCF) para establecer el modelo dinámico del sistema de captura de bolsillo de película delgada. Emplee elementos ANCF de alto orden con 8 nodos para describir el movimiento de la superficie de la película, representando el vector de posición global a través de polinomios de interpolación Φi (xi , yi ).
Describe la deformación de los puntos materiales usando el tensor de deformación de Green-Lagrange y sustitúyelo en el tensor de gradiente del vector de posición global J i para derivar las ecuaciones de movimiento del elemento. Emplear el principio del trabajo virtual para deducir las ecuaciones cinemáticas del elemento. Además, introduzca el controlador u , velocidad angular ω( ω) , y cuaternión unitario q .
Deducir las derivadas de los errores de seguimiento de actitud, incluido el error de velocidad angular ω e y matriz de rotación de actitud A qe . Finalmente, incorporando los efectos del momento de inercia de la nave espacial J R y perturbación externa d , deriva las ecuaciones dinámicas de actitud de la nave espacial.
Posteriormente, el autor, basándose en el control de modo deslizante no lineal, ideó una superficie F de modo deslizante terminal rápido (FTSM). . Para evitar problemas de singularidad en FTSM, se diseña una superficie F de modo deslizante terminal no singular rápido (FNTSM) cuando |q ei | <ψ .
La introducción de un observador de estado extendido de tiempo fijo (FxESO) implica diseñar ecuaciones dinámicas para el error de observación, lo que permite estimar las incertidumbres. Finalmente, basado en FTNSM y FxESO, se diseña un controlador de nave espacial para lograr convergencia y estabilidad en un tiempo finito.
A continuación, el autor estableció un prototipo virtual y realizó análisis de simulación numérica de las teorías dinámicas y de control relevantes. El estudio reveló que, después de las maniobras de actitud de la nave espacial, el sistema se estabilizó gradualmente.
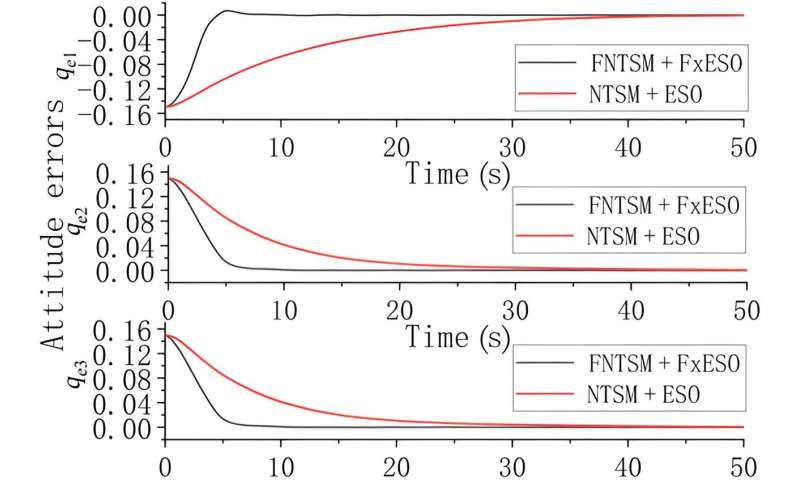
Sin embargo, todavía había vibraciones en las varillas flexibles, lo que impedía que la membrana se apretara completamente, lo que provocaba arrugas continuas en la superficie de la membrana. Además, se comparó el controlador FNTSM + FxESO con el controlador Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO), y se analizaron los errores de actitud bajo este controlador.
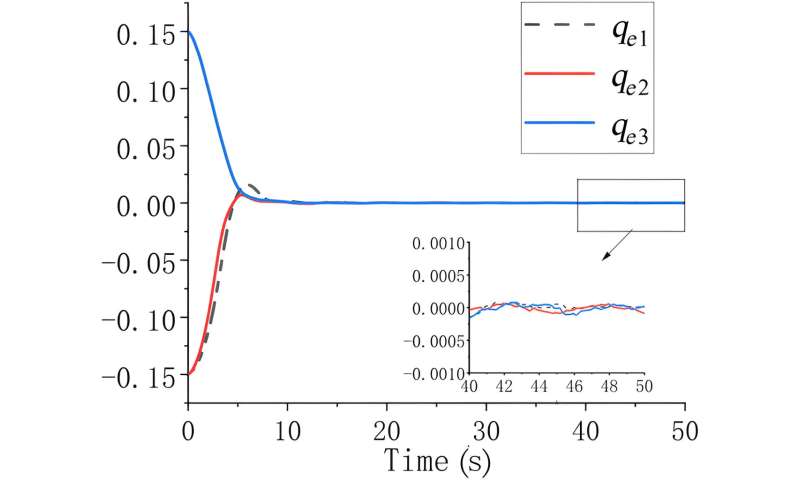
Los resultados indican que el controlador FNTSM + FxESO lleva la nave espacial a la actitud deseada después de 10 segundos, lo que es aproximadamente 25 segundos más rápido en comparación con el controlador NTSM + ESO. Esto mejora significativamente la velocidad de convergencia del error de actitud del sistema.
Además, este controlador puede suprimir eficazmente las vibraciones de alta amplitud, manteniendo el error de actitud en estado estable en una magnitud de 10 -4 . Esto demuestra la alta eficiencia, precisión y estabilidad del controlador propuesto.
Más información: Zhuoran Huang et al, Dinámica y control FNTSM de naves espaciales con un sistema de bolsillo de captura de película, Espacio:ciencia y tecnología (2023). DOI:10.34133/espacio.0079
Proporcionado por el Instituto de Tecnología de Beijing Press Co., Ltd