La exploración de la Luna se ha convertido cada vez más en un punto central últimamente, especialmente con una serie de módulos de aterrizaje lanzados recientemente con diversos grados de éxito. Una de las dificultades que enfrentan esos módulos de aterrizaje y cualquier misión humana futura es comprender el terreno en el que aterrizan y potencialmente atraviesan en el caso de un rover o un humano. Para ayudar a combatir este problema, un equipo de investigadores de Suiza ha desarrollado un concepto de dron que podría ayudar a mapear algunas de las áreas más interesantes y potencialmente peligrosas para explorar en la luna.
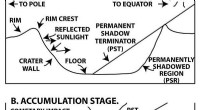
Mapear la Luna ya es una prioridad desde hace años. Sin embargo, algunas de las regiones más interesantes, como las Regiones de Sombra Permanente (PSR) en los polos lunares que contienen una cantidad significativa de hielo de agua, sólo han sido mapeadas con una resolución de aproximadamente 1 m por píxel en las mejores imágenes de ellas. Esto incluye la mejora artificial mediante algoritmos respaldados por IA.
Ese nivel de resolución no es lo suficientemente cercano como para proporcionar datos de planificación útiles para posibles misiones de rover o humanas:la rueda de un rover determinado no tendrá ni siquiera más ancho, y mucho menos espera atravesar un obstáculo de ese tamaño. En consecuencia, cualquier rover que enviemos debe ser controlado manualmente o recorrer su camino de forma muy lenta y autónoma. Dado el cronograma operativo limitado de estas misiones de rover esperadas, ese ritmo lento podría limitar su capacidad para buscar recursos y sitios valiosos que los científicos creen que se esconden en los PSR.
La solución obvia a este problema es tener otra forma de robot que sirva como explorador, similar a lo que Ingenuity había estado haciendo para el rover Perseverance en Marte hasta hace poco. Esa colaboración había permitido a Perseverance establecer el récord del viaje autónomo más largo en un solo día en otro planeta:un total de unos 700 m. Si un explorador pudiera mapear los detalles de la superficie lunar frente a un potencial rover, podría moverse incluso más rápido que el ritmo marcado por Perseverance.
Con este fin, se han planificado muchas misiones para hacer precisamente eso. En un artículo reciente publicado en Acta Astronautica Al describir su idea, Romeo Tonasso y sus colegas de la Escuela Politécnica Federal de Lausana dividieron estos conceptos de misión existentes en dos categorías:grandes y pequeñas.
Los sistemas más grandes pueden contener sistemas de propulsión química probados y disponibles en el mercado que, cuando se prueban en vuelo, pueden ser voluminosos y utilizar productos químicos potencialmente peligrosos. Los sistemas más pequeños podrían utilizar diferentes formas de propulsión química, como el H2 O2 cohetes, o incluso medios de locomoción más mundanos, como saltar literalmente del suelo con las piernas. Sin embargo, muchas de las tecnologías para ese tipo de propulsión aún no se encuentran en un nivel de desarrollo lo suficientemente alto como para usarlas en una misión práctica.
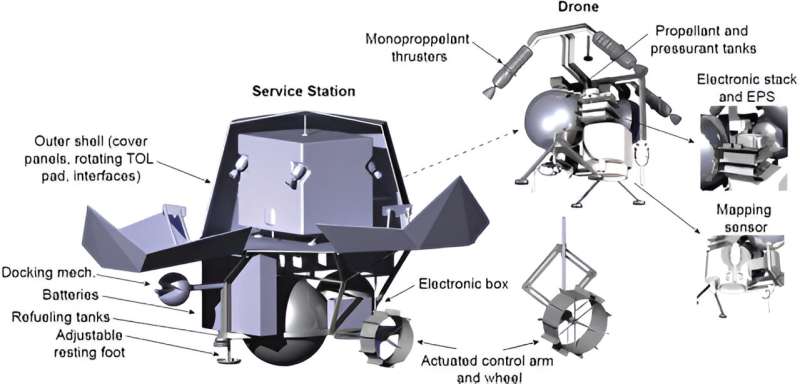
Encontrar un término medio entre el modelo de tolva más antiguo y pesado y el más nuevo y no probado fue una de las principales limitaciones de diseño del nuevo concepto. La solución que se les ocurrió fue un dron propulsado por cohete que se lanzaría desde una estación base y regresaría a ella y que podría ser remolcado por un rover u otro vehículo de exploración lunar.
La estación base reabastecería de combustible al dron después de cada vuelo, lo que le permitiría realizar múltiples vuelos sin llevar exceso de peso de propulsor. Con esta configuración, el sistema podría mapear hasta 9 kilómetros cuadrados de la superficie lunar con una resolución que sería útil para la planificación de misiones tanto de rovers como humanas. Al final de ese esfuerzo, la estación base tendría que ser repostada, lo que le permitiría continuar con su misión, que es una parte central del concepto de diseño.
Esta idea tiene otras ventajas:muchas otras tolvas tienen que aterrizar en el suelo y su sistema de propulsión puede introducir una cantidad significativa de caos en el entorno lunar. Esto es especialmente indeseable si la superficie sobre la que aterrizan contiene materiales comercialmente viables, como hielo de agua. Aterrizar de regreso en una estación de acoplamiento móvil también elimina cualquier levantamiento de polvo, lo que puede dificultar significativamente las operaciones en un área, dado el tiempo que tarda el polvo en asentarse en la luna.
Si bien hay algunos detalles en el documento, incluida alguna discusión sobre arquitectura de alto nivel que utiliza hardware probado en el espacio, hasta ahora, esta idea es solo un concepto. Sin embargo, dado que la fecha del aterrizaje humano de Artemis III se acerca rápidamente, la NASA y otras agencias espaciales sin duda se beneficiarían de una misión de exploración exitosa como la descrita en el artículo. Sin embargo, aún está por verse si llevarán o no la idea hasta la línea de meta.
Más información: Roméo Tonasso et al, Un dron de reconocimiento lunar para exploración cooperativa y mapeo de alta resolución de ubicaciones extremas, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006
Proporcionado por Universe Today