Intuitive Machines logró recientemente un gran avance al convertirse con éxito en la primera entidad no gubernamental en aterrizar en la luna en febrero. Al menos el aterrizaje fue parcialmente exitoso:el módulo de aterrizaje Odysseus de la compañía terminó de lado, aunque sus instrumentos y enlaces de comunicación permanecieron al menos parcialmente funcionales. Esa misión, denominada IM-1, fue la primera de una serie de ambiciosas misiones que la compañía ha planeado. Y recientemente publicaron un artículo en la conferencia LPSC 2024 que detalla las características de un robot saltador único que viajará en su próxima misión lunar.
Conocido como South Pole Hopper (o S.P. Hopper), el robot será el primero de una nueva clase llamada µNova. Con un peso de sólo 35 kg y una altura de sólo 70 cm, esta nave miniaturizada es una nave espacial independiente que puede funcionar de forma totalmente autónoma. Debe hacer esto para completar su misión de explorar la región alrededor de las regiones permanentemente sombreadas (PSR) en el polo sur lunar.
En concreto, la nave tiene cuatro objetivos distintos:
Ninguno de esos objetivos requiere individualmente la característica más notable de S.P. Hopper, pero seguro que sería útil completarlos:puede "saltar" impulsándose desde la superficie lunar y aterrizando en un área que elija de forma completamente autónoma, incluso en un PSR. Puede hacerlo en un ángulo de hasta 10 grados, según señala rápidamente la compañía, dadas sus recientes dificultades con el ángulo de las naves espaciales.
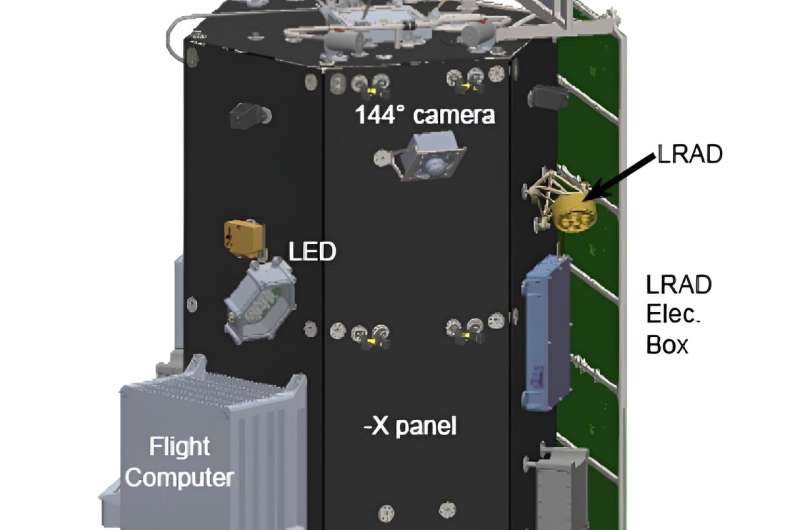
El documento describe varias características técnicas del hopper, incluido el hecho de que utilizará un sistema LTE inalámbrico para comunicarse. Para recopilar los datos necesarios para su misión, cuenta con tres instrumentos científicos principales:un conjunto de cámaras CMOS, cuya tarea principal es ayudar con la navegación autónoma pero que también puede enviar imágenes a la Tierra para ser analizadas; el sistema de sensores de termopila LRAD; diseñado para capturar mediciones de brillo del regolito, y el PLWS, un espectrómetro de neutrones en miniatura, diseñado específicamente para buscar hidrógeno en el espacio.
Sin embargo, quizás la parte más interesante del artículo detalla su plan de vuelo. S. P. Hopper está diseñado para dar 5, posiblemente 6, saltos cuando aterrice en el polo sur lunar. El primero será un "salto de puesta en servicio" que sólo recorrerá unos 20 metros. El siguiente será un salto de "prueba de concepto" de 100 m que demostrará que un robot saltador es un medio de transporte viable en la Luna.
Después de esos vuelos iniciales, S. P. Hopper volará unos 300 m hasta el borde del cráter Marston, parte de la cresta Shackleton-de Gerlache. Luego volará hacia el cráter mismo, que es un PSR, y luego volará de regreso a la cresta nuevamente. Si queda suficiente combustible, Intuitive Machines planea un sexto vuelo exploratorio para observar cualquier cosa interesante en los alrededores.
Actualmente, el lanzamiento del IM-2, el vuelo que llevará a S.P. Hopper al Polo Sur, está previsto para este año. Dado el relativo éxito de Intuitive Machine con el módulo de aterrizaje Odysseus, también hay mucho optimismo sobre el éxito de esta misión. Por ahora, sin embargo, tendremos que esperar y ver si la empresa puede llevar a cabo una misión de seguimiento aún más exitosa.
Más información: Documento:www.hou.usra.edu/meetings/lpsc2024/pdf/1162.pdf
Proporcionado por Universe Today