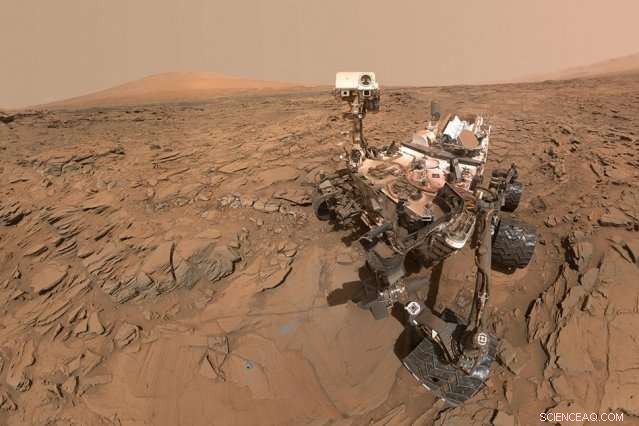
Un autorretrato del rover Curiosity Mars de la NASA. Crédito:NASA / JPL-Caltech / MSSS
Seleccionar un lugar de aterrizaje para un rover que se dirige a Marte es un proceso largo que normalmente involucra a grandes comités de científicos e ingenieros. Estos comités suelen pasar varios años sopesando los objetivos científicos de una misión con las limitaciones de ingeniería de un vehículo, para identificar sitios que sean científicamente interesantes y seguros para aterrizar.
Por ejemplo, el equipo científico de una misión puede querer explorar ciertos sitios geológicos en busca de señales de agua, vida, y habitabilidad. Pero los ingenieros pueden encontrar que esos sitios son demasiado empinados para que un vehículo aterrice de manera segura, o es posible que las ubicaciones no reciban suficiente luz solar para alimentar los paneles solares del vehículo una vez que haya aterrizado. Por lo tanto, encontrar un lugar de aterrizaje adecuado implica reunir la información recopilada a lo largo de los años por misiones pasadas a Marte. Estos datos, aunque creciendo con cada misión, son irregulares e incompletas.
Ahora, los investigadores del MIT han desarrollado una herramienta de software para el descubrimiento asistido por computadora que podría ayudar a los planificadores de misiones a tomar estas decisiones. Produce automáticamente mapas de lugares de aterrizaje favorables, utilizando los datos disponibles sobre la geología y el terreno de Marte, así como una lista de prioridades científicas y limitaciones de ingeniería que un usuario puede especificar.
Como ejemplo, un usuario puede estipular que un rover debe aterrizar en un sitio donde pueda explorar ciertos objetivos geológicos, como los lagos de cuenca abierta. Al mismo tiempo, el lugar de aterrizaje no debe exceder una cierta pendiente, de lo contrario, el vehículo se volcaría al intentar aterrizar. Luego, el programa genera un "mapa de favorabilidad" de los lugares de aterrizaje que cumplen con ambas restricciones. Estas ubicaciones pueden cambiar y cambiar a medida que un usuario agrega especificaciones adicionales.
El programa también puede trazar posibles caminos que un rover puede tomar desde un lugar de aterrizaje determinado hasta ciertas características geológicas. Por ejemplo, si un usuario especifica que un rover debe explorar exposiciones a rocas sedimentarias, el programa genera rutas a dichas estructuras cercanas y calcula el tiempo que tardaría en llegar a ellas.
Víctor Pankratius, científico investigador principal del Instituto Kavli de Astrofísica e Investigación Espacial del MIT, dice que los planificadores de la misión pueden usar el programa para considerar rápida y eficientemente diferentes escenarios de aterrizaje y exploración.
"Esto nunca reemplazará al comité actual, pero puede hacer que las cosas sean mucho más eficientes, porque puedes jugar con diferentes escenarios mientras hablas, "Dice Pankratius.
El estudio del equipo fue publicado en línea el 31 de agosto por Ciencias de la Tierra y el Espacio y es parte de la edición en línea del 8 de septiembre de la revista.
Nuevos sitios
Pankratius y el postdoctorado Guillaume Rongier, en el Departamento de Tierra del MIT, Ciencias Atmosféricas y Planetarias, creó el programa para identificar sitios de aterrizaje favorables para una misión conceptual similar al rover Mars 2020 de la NASA, que está diseñado para aterrizar en horizontal, incluso, áreas libres de polvo y tiene como objetivo explorar una antigua, potencialmente habitable, sitio con afloramientos magmáticos.
Descubrieron que el programa identificó muchos sitios de aterrizaje para el rover que se habían considerado en el pasado, y destacó otros lugares de aterrizaje prometedores que rara vez se propusieron. "Vemos que hay sitios que podríamos explorar con las tecnologías móviles existentes, que los comités de sitios de aterrizaje quieran reconsiderar, "Dice Pankratius.
El programa también podría utilizarse para explorar los requisitos de ingeniería para las futuras generaciones de vehículos exploradores de Marte. "Suponiendo que puedas aterrizar en curvas más pronunciadas, o conduce más rápido, luego podemos derivar qué nuevas regiones puedes explorar, "Dice Pankratius.
Un aterrizaje difuso
El software se basa en parte en "lógica difusa, "un esquema de lógica matemática que agrupa las cosas no de forma binaria como la lógica booleana, como si / no, verdadero Falso, o seguro / inseguro, pero de una manera mas fluida, moda basada en la probabilidad.
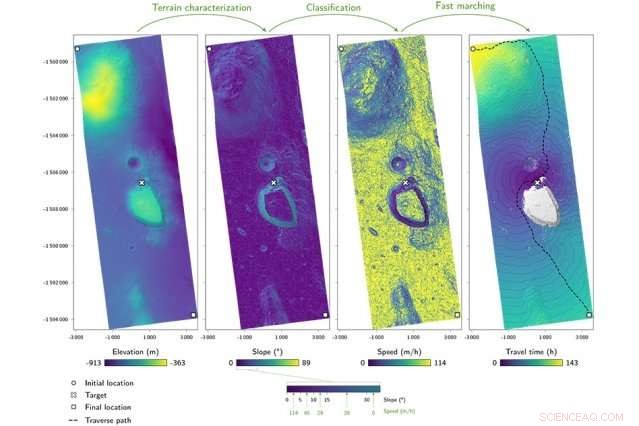
La figura muestra los pasos sucesivos para imitar a un rover conduciendo por Marte. Los investigadores del MIT desarrollaron un método para caracterizar primero el terreno sobre el área de interés. Basado en esa caracterización y las características del rover, utilizan un algoritmo de "marcha rápida" para estimar la velocidad del rover, que utilizan para calcular el tiempo que les lleva conducir en cualquier lugar sobre esa área. También pueden estimar el camino más corto desde una ubicación inicial, a un objetivo, a una ubicación final. Crédito:NASA / JPL / Universidad de Arizona, Guillaume Rongier
"Tradicionalmente, esta idea proviene de las matemáticas, donde en lugar de decir que un elemento pertenece a un conjunto, sí o no, la lógica difusa dice que pertenece con cierta probabilidad, "reflejando así información incompleta o imprecisa, Pankratius explica.
En el contexto de encontrar un lugar de aterrizaje adecuado, el programa calcula la probabilidad de que un rover pueda subir una cierta pendiente, con la probabilidad disminuyendo a medida que la ubicación se vuelve más empinada.
"Con la lógica difusa podemos expresar esta probabilidad espacialmente. ¿Qué tan malo es si soy así de empinado? versus esta empinada, ", Dice Pankratius." Es una forma de lidiar con la imprecisión, en cierto sentido."
Usando algoritmos relacionados con la lógica difusa, el equipo crea raw, o inicial, mapas de favorabilidad de posibles lugares de aterrizaje en todo el planeta. Estos mapas están reticulados en celdas individuales, cada uno representa aproximadamente 3 kilómetros cuadrados en la superficie de Marte. El programa calcula, para cada celda, la probabilidad de que sea un lugar de aterrizaje favorable, y genera un mapa que está clasificado por colores para representar probabilidades entre 0 y 1. Las celdas más oscuras representan sitios con una probabilidad cercana a cero de ser un sitio de aterrizaje favorable, mientras que los lugares más livianos tienen una mayor probabilidad de un aterrizaje seguro con interesantes perspectivas científicas.
Una vez que generan un mapa sin procesar de posibles sitios de aterrizaje, los investigadores tienen en cuenta varias incertidumbres en el lugar de aterrizaje, como cambios en la trayectoria y posibles errores de navegación durante el descenso. Teniendo en cuenta estas incertidumbres, el programa luego genera elipses de aterrizaje, o blancos circulares donde es probable que aterrice un rover para maximizar la seguridad y la exploración científica.
El programa también utiliza un algoritmo conocido como marcha rápida para trazar las rutas que un rover puede tomar sobre un terreno determinado una vez que aterriza. La marcha rápida se utiliza normalmente para calcular la propagación de un frente, como la rapidez con la que un frente de viento llega a la orilla si viaja a una velocidad determinada. Por primera vez, Pankratius y Rongier aplicaron la marcha rápida para calcular el tiempo de viaje de un rover a medida que viaja desde un punto de partida a una estructura geológica de interés.
"Si estás en algún lugar de Marte y obtienes este mapa procesado, puedes pedir, 'De aquí, ¿Qué tan rápido puedo ir a cualquier punto de mi entorno? Y este algoritmo te dirá "Dice Pankratius.
El algoritmo también puede trazar rutas para evitar ciertos obstáculos que pueden ralentizar el viaje de un rover. y trazar las probabilidades de chocar con ciertos tipos de estructuras geológicas en un área de aterrizaje.
"Es más difícil para un rover conducir a través del polvo, por lo que irá a un ritmo más lento, y el polvo no está necesariamente en todas partes, solo en parches, "Dice Rongier." El algoritmo considerará tales obstáculos al trazar las rutas transversales más rápidas ".
Los equipos dicen que los operadores de los vehículos exploradores actuales en la superficie marciana pueden usar el programa de software para dirigir los vehículos de manera más eficiente a sitios de interés científico. En el futuro, Pankratius prevé que esta técnica o algo similar se integre en rovers cada vez más autónomos que no requieren que los humanos operen los vehículos todo el tiempo desde la Tierra.
"Un día, si tenemos rovers completamente autónomos, pueden tener en cuenta todas estas cosas para saber a dónde pueden ir, y ser capaz de adaptarse a situaciones imprevistas, "Pankratius dice." Quieres autonomía, de lo contrario, puede llevar mucho tiempo comunicarse de un lado a otro cuando tenga que tomar decisiones críticas rápidamente ".
El equipo también está investigando aplicaciones de las técnicas en la exploración de sitios geotérmicos en la Tierra en colaboración con el Laboratorio de Recursos Terrestres del MIT en el Departamento de la Tierra. Ciencias Atmosféricas y Planetarias.
"Es un problema muy similar, ", Dice Pankratius". En lugar de decir '¿Es un buen sitio? ¿sí o no?' puedes decir, 'Muéstreme un mapa de todas las áreas que probablemente serían viables para la exploración geotérmica' ".
A medida que mejoran los datos, tanto para Marte como para las estructuras geotérmicas de la Tierra, dice que esos datos se pueden introducir en el programa existente para proporcionar análisis más precisos.
"El programa se puede mejorar gradualmente, " él dice.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.