Crédito:Universidad de Harvard
Malas noticias para los ofiofóbicos:investigadores de la Escuela de Ingeniería y Ciencias Aplicadas (SEAS) John A. Paulson de Harvard han desarrollado un robot blando inspirado en serpientes nuevo y mejorado que es más rápido y preciso que su predecesor.
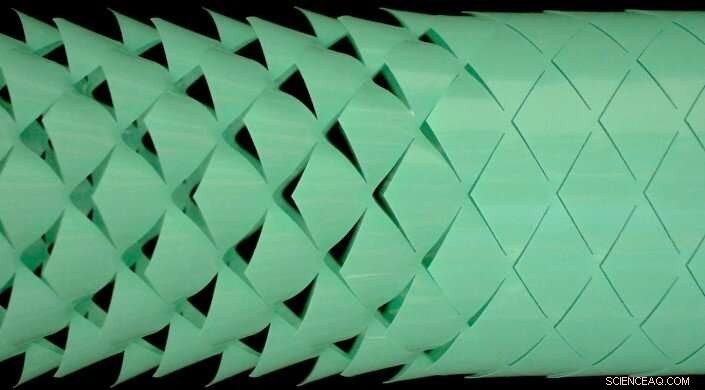
El robot está hecho con kirigami, una artesanía de papel japonesa que se basa en cortes para cambiar las propiedades de un material. A medida que el robot se estira, la superficie del kirigami "aparece" en una superficie con textura tridimensional, que se agarra al suelo como la piel de una serpiente.
El robot de primera generación utilizó una hoja plana de kirigami, que se transformó uniformemente cuando se estiró. El nuevo robot tiene un caparazón programable, lo que significa que los cortes de kirigami pueden aparecer como se desee, mejorando la velocidad y precisión del robot.
La investigación fue publicada en el procedimientos de la Academia Nacional de Ciencias .
"Este es un primer ejemplo de una estructura de kirigami con deformaciones emergentes no uniformes, "dijo Ahmad Rafsanjani, becario postdoctoral en SEAS y primer autor del artículo. "En kirigami plano, la ventana emergente es continua, lo que significa que todo aparece a la vez. Pero en el caparazón de kirigami, emergente es discontinuo. Este tipo de control de la transformación de forma podría usarse para diseñar superficies sensibles y máscaras inteligentes con cambios a pedido en su textura y morfología ".
La nueva investigación combinó dos propiedades del material:el tamaño de los cortes y la curvatura de la hoja. Al controlar estas funciones, los investigadores pudieron programar la propagación dinámica de ventanas emergentes de un extremo a otro, o controlar las ventanas emergentes localizadas.
En investigaciones anteriores, se envolvió una hoja plana de kirigami alrededor de un actuador de elastómero. En esta investigación, la superficie del kirigami se enrolla en un cilindro, con un actuador que aplica fuerza en dos extremos. Si los cortes son de un tamaño constante, la deformación se propaga de un extremo del cilindro al otro. Sin embargo, si el tamaño de los cortes se elige con cuidado, la piel se puede programar para que se deforme en las secuencias deseadas.
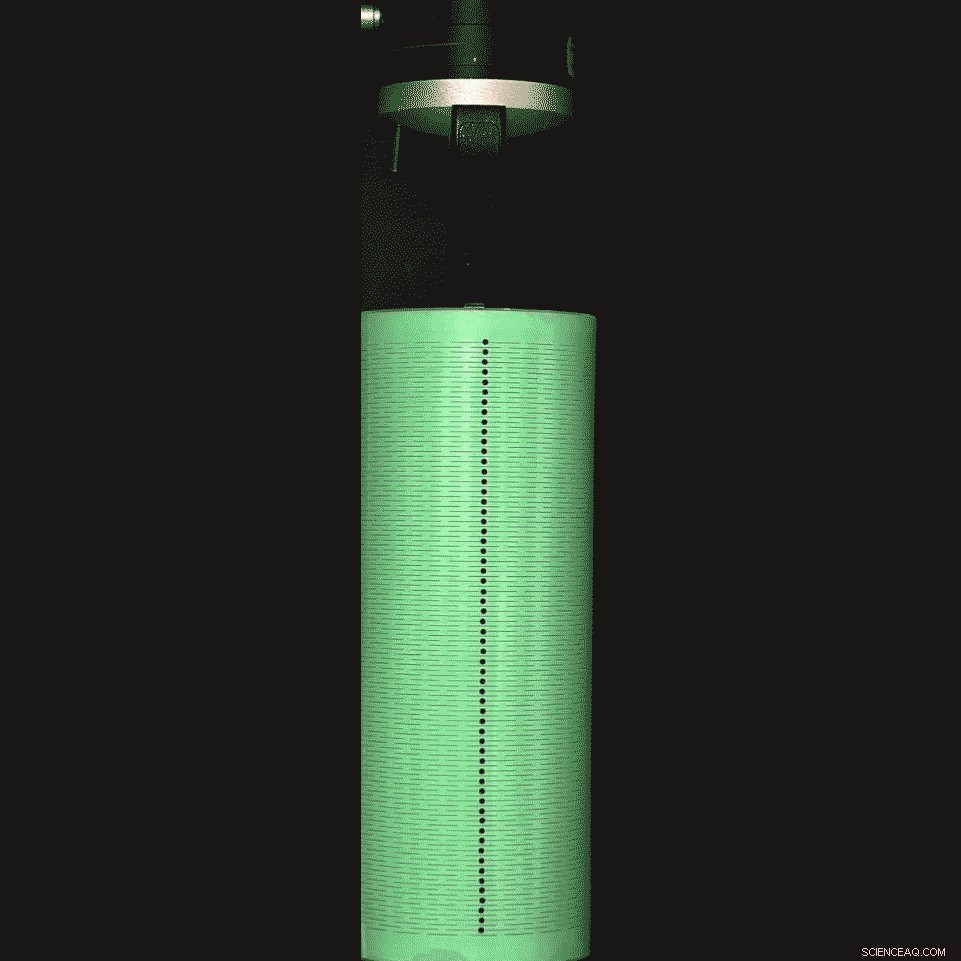
Este es un nuevo y mejorado robot blando inspirado en serpientes que es más rápido e inteligente que su predecesor. Crédito:Harvard SEAS
"Tomando prestadas ideas de materiales de transformación de fase y aplicándolas a materiales arquitectónicos inspirados en kirigami, Demostramos que las fases reventadas y no reventadas pueden coexistir al mismo tiempo en el cilindro, "dijo Katia Bertoldi, el Profesor William y Ami Kuan Danoff de Mecánica Aplicada en SEAS y autor principal del artículo. "Simplemente combinando cortes y curvatura, podemos programar comportamientos notablemente diferentes ".
Próximo, los investigadores tienen como objetivo desarrollar un modelo de diseño inverso para deformaciones más complejas.
"La idea es, si sabes como te gustaría que se transformara la piel, puedes simplemente cortar rueda y vete, "dijo Lishuai Jin, estudiante de posgrado en SEAS y coautor del artículo.