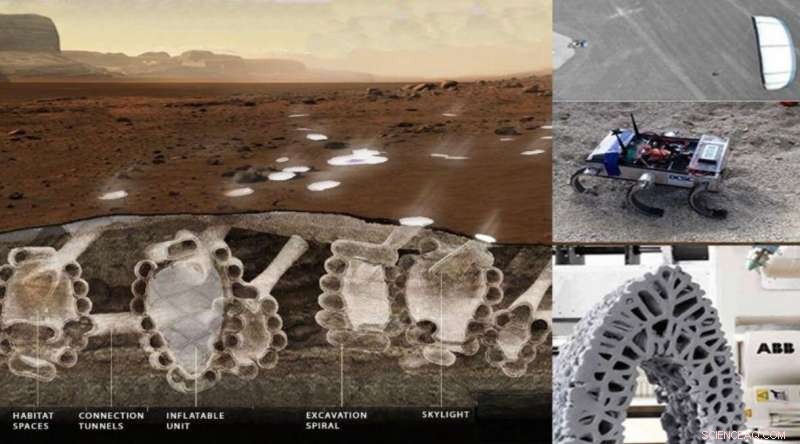
Concepto de hábitat subterráneo y los robots y fuentes de energía que lo construirán y lo impulsarán. Crédito:Bier et al.
Los hábitats subterráneos se han convertido recientemente en un punto focal de los esfuerzos de colonización fuera del planeta. Protección contra micrometeoritos, la radiación y otros peligros potenciales hacen que los sitios subterráneos sean deseables en comparación con las viviendas en la superficie. La construcción de tales estructuras subterráneas presenta una plétora de desafíos, no es el menor de los cuales es cómo construirlos realmente. Un equipo de investigadores de la Universidad Tecnológica de Delft (TUD) está trabajando en un plan para excavar material y luego usarlo para imprimir hábitats. Todo eso se haría con un grupo de robots enjambres.
La idea surge de una oportunidad de subvención publicada por la Agencia Espacial Europea. Estudiantes en el laboratorio de construcción robótica (RB) en TU Delft, dirigido por la Dra. Henriette Bier, estaban entusiasmados de participar en el desafío que se centra en la utilización de recursos in situ para la construcción fuera de la Tierra. El equipo de RB, junto con expertos en ciencia de los materiales, robótica, y la ingeniería aeroespacial presentó una idea a la que se le concedieron 100.000 € para desarrollar una prueba de concepto preliminar.
El enfoque propuesto se centra en la especialidad del laboratorio, la construcción robótica, y tiene cuatro componentes principales:excavar el regolito, imprimir un nuevo hábitat mediante un proceso de fabricación aditiva, coordinar el trabajo entre todos los robots que serían necesarios para completar las tareas, y alimentarlos, así como el hábitat.
La excavación de regolitos con robots se ha explorado anteriormente, pero generalmente en el contexto de la luna. Diferentes patrones de excavación son útiles para construir diferentes estructuras, y el patrón en el que se centró el equipo de RB fue una espiral descendente. Una estructura de este tipo podría crear un estructura segura dentro de una huella relativamente pequeña en la superficie.
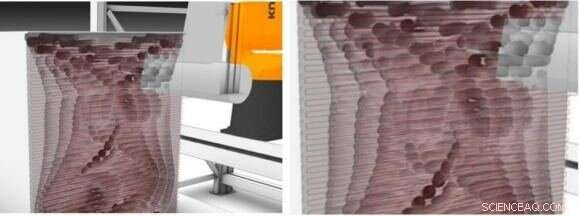
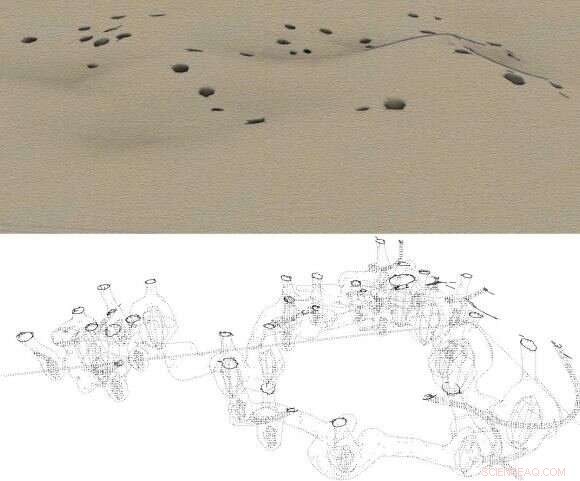
Ejemplo de algunas de las trayectorias sustractivas que se utilizarían para excavar los túneles del hábitat. Crédito:Bier et al.
Un ejemplo del hábitat del "rizoma" que tendría un área expuesta relativamente pequeña en la superficie pero proporcionaría un gran espacio habitable subterráneo. Crédito:Bier et al.
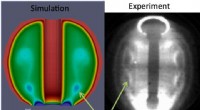
Modelar las tensiones y tensiones en esa estructura es un componente clave del proyecto de estudio actual. El equipo desarrolló un prototipo a escala de 1 mx 1 m de un fragmento con patrones que les permitiría crear áreas seguras y estables de manera efectiva. Algunas de esas áreas se diseñaron teniendo en cuenta la habitación, incluyendo áreas de plantas desmontables que podrían albergar plantas cultivadas hidropónicamente.
Toneladas y toneladas de regolito tendrían que ser removidas de cualquier sitio de excavación a escala real. Ese regolito se utiliza como material para imprimir en 3D un hábitat estable. Originalmente, el equipo planeaba combinar regolito con azufre líquido para producir hormigón. Pero después de involucrar a científicos de materiales y un socio industrial especializado en impresión robótica con cemento, decidieron usar concreto a base de cemento aprovechando algunos de los recursos hídricos de Marte. Sin embargo, la creación de cemento en sí misma requiere una infraestructura, por lo que cualquier plan de este tipo para usar regolito tendría que esperar hasta que esa infraestructura ya estuviera en su lugar en el planeta.
La estructuración del hábitat en sí también es una consideración clave al diseñar qué forma debe imprimirse en 3D. El equipo se centró en estructuras relativamente porosas, lo que les permitió utilizar menos material en su construcción. Sin embargo, las estructuras todavía tenían una resistencia y durabilidad notablemente altas y también proporcionaban un buen aislamiento de la radiación y los impactos de micrometeoritos que la colonia subterránea busca evitar.
Algunas de las ventajas de este enfoque se deben a uno de los mayores impulsores de la innovación:la colaboración. El proyecto está coordinado por el laboratorio de RB, pero involucra socios tanto de TUD como de socios comerciales externos. Estos colaboradores aportan civil, aeroespacial, y experiencia en ingeniería robótica, y tecnologías de fabricación aditiva para desarrollar el enfoque de construcción de enjambres robóticos.