Mostrado en velocidad 4x, un microrobot con forma de flor se acerca a las cuentas de plástico, utiliza fuerzas capilares para pegarlas a uno de sus pétalos, luego los suelta en la ubicación deseada girando en su lugar. Crédito:Penn Engineering
A escalas microscópicas, cosecha, colocación, coleccionismo y ordenar los objetos es un desafío constante. Los avances en nanotecnología significan que hay cosas cada vez más complejas que nos gustaría construir en esos tamaños, pero faltan herramientas para mover sus componentes.
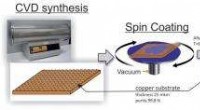
Una nueva investigación de la Escuela de Ingeniería y Ciencias Aplicadas muestra cuán simple, robots microscópicos, impulsado a distancia por campos magnéticos, puede utilizar fuerzas capilares para manipular objetos que flotan en una interfaz agua-aceite. Este sistema se demostró en un estudio publicado en la revista Letras de física aplicada .
El estudio fue dirigido por Kathleen Stebe, Richer &Elizabeth Goodwin Profesora en el Departamento de Ingeniería Química y Biomolecular de Penn Engineering, y Tianyi Yao, una estudiante de posgrado en su laboratorio. Nicholas Chisholm, investigador postdoctoral en el laboratorio de Stebe, y Edward Steager, un científico investigador del laboratorio GRASP de Penn Engineering contribuyó a la investigación.
Los microrobots en el estudio del equipo de Penn son finas láminas de imán, alrededor de un tercio de milímetro de diámetro. A pesar de no tener partes móviles ni sensores propios, los investigadores se refieren a ellos como robots debido a su capacidad para elegir y colocar objetos arbitrarios que son incluso más pequeños que ellos.
Esa capacidad es una función del entorno especializado en el que trabajan estos microrobots:en la interfaz entre dos líquidos. En este estudio, la interfaz es entre el agua y el hexadecano, un aceite común. Una vez ahí, los robots deforman la forma de esa interfaz, esencialmente rodeándose de un "campo de fuerza" invisible de interacciones capilares.
Las mismas fuerzas capilares que extraen agua de las raíces de un árbol a sus hojas se utilizan aquí para hacer que las micropartículas de plástico entren en contacto con el robot. u otras partículas ya adheridas a sus bordes.
"Hemos utilizado estas fuerzas capilares para ensamblar cosas antes, pero ahora los robots y las partículas son mucho más livianos y unos pocos órdenes de magnitud más pequeños en diámetro, "Dice Stebe." Cuando bajes a la escala de micrones, significa que un tipo diferente de física gobierna las distorsiones. Recopilar y organizar objetos de unas pocas decenas de micrones de diámetro es todo un logro, y no algo que podamos hacer a mano ".
El estudio demostró la física que gobierna las interacciones entre estos micro-robots y las partículas de plástico que tenían la tarea de manipular.
"En el pasado, "Stebe dice, "tomamos objetos estáticos e hicimos distorsiones a su alrededor, luego mostró cómo las partículas eran atraídas por las regiones de "alta curvatura" de esas distorsiones. Ahora, en lugar de un objeto estático, tenemos un imán que sirve como fuente de distorsión móvil ".
"Esto complica las cosas, ", Dice Chisholm." A medida que el robot se mueve hacia las partículas, crea un campo de flujo que empuja las partículas lejos, así que ahora interactúan la repulsión hidrodinámica y la atracción capilar. Las partículas siguen el mínimo de energía, lo que podría significar moverse cuesta arriba ".
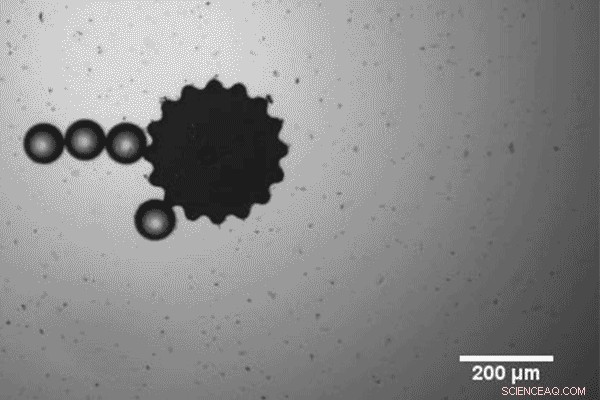
Con un robot de forma cuadrada, los investigadores vieron que una vez que tenían partículas sobre la cresta de la deformación, se sintieron fuertemente atraídos por las esquinas. Esta es una propiedad potencialmente útil, ya que los robots podrían acercarse a sus objetivos desde una amplia gama de ángulos y orientaciones y aún así terminar con la partícula en una ubicación predecible.
"Hemos demostrado que cuando cambia la forma del robot, cambia el tipo y la fuerza de las interacciones, "Dice Stebe." Las esquinas afiladas se aferran a las partículas como una muerte siniestra, pero cuando suavizamos las esquinas, podemos darles una vuelta a los robots para liberarlos ".
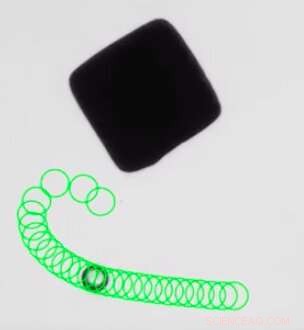
Las partículas son fuertemente atraídas por las esquinas de los robots de forma cuadrada. El contorno verde muestra la trayectoria que toma la partícula cuando el robot se acerca. Crédito:Universidad de Pensilvania
Además de un cuadrado de esquinas suaves, los investigadores también experimentaron con un robot redondo, así como una en forma de flor. Todos tenían la ventaja adicional de poder liberar con precisión su carga girando en su lugar, con los "pétalos" del robot en forma de flor que proporcionan el control más preciso sobre la ubicación de una partícula de carga.
Finalmente, el equipo demostró una estación de acoplamiento. Consta de una pieza estática de plástico ondulado, la estación de acoplamiento se encuentra en la parte superior y en la parte inferior de la interfaz. Esta disposición proporciona un conjunto de distorsiones muy predecible donde el material cruza la interfaz.
"Podemos mover estos robots y recolectar cosas, "Steager dice, "Construir materiales realmente complicados recogiendo las piezas una a la vez y acoplándolas donde queramos".
Debido a que las interacciones entre los robots y las partículas no tienen nada que ver con los materiales de los que están hechos, es posible una amplia gama de aplicaciones.
"Las partículas que estamos manipulando en este estudio tienen aproximadamente el tamaño promedio de una célula humana o más pequeñas, "Yao dice, "por lo que este tipo de sistema podría tener aplicaciones en el campo de la biología unicelular, con un micro-robot magnético que mueve células individuales a través de diferentes etapas de un experimento ".
"Estas partículas también podrían ser parte de un sistema de sensores, ", dice." Si tuvieras un robot y un sensor de partículas en una interfaz, podría recolectar esas partículas y llevar todo el ensamblaje hacia el área objetivo con un grado extremadamente fino de control espacial. En este escenario, se necesita una concentración muy baja de partículas del sensor y pueden retraerse fácilmente después de la prueba ".
El trabajo futuro involucrará el desarrollo de una biblioteca más grande de formas y comportamientos de micro-robots para manipular objetos en su entorno, así como sistemas de detección y control más robustos que permitirían un mayor grado de autonomía para los robots.