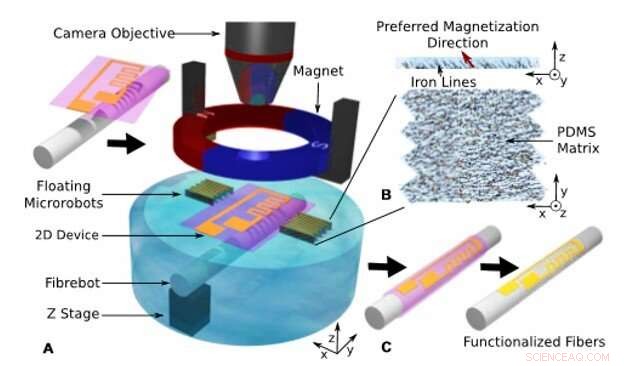
Configuración de la transferencia húmeda de alta precisión asistida por microrobot. (A) Microrobots controlados magnéticamente a través de un imán externo para alinear un dispositivo 2D flotante en un sustrato objetivo (por ejemplo, fibra óptica y microdispositivo 3D). (B) Vista de la estructura del microbot en la que se utilizan líneas de hierro atrapadas en una matriz de elastómero para almacenar una dirección de magnetización preferida. (C) Dispositivos ensamblados finales que presentan el patrón funcional alineado con una precisión de 5 µm y 0,4 °. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
La cirugía mínimamente invasiva se utiliza cada vez más para tratar pequeñas lesiones y existe una demanda creciente de herramientas médicas miniaturizadas. Estos incluyen microcatéteres, micro-fórceps o pinzas articuladas para detectar y actuar durante la cirugía de precisión. La integración y funcionalización precisas de sensores químicos y físicos sigue siendo un gran desafío. En un nuevo estudio sobre Ciencia Robótica , Antoine Barbot y sus colegas del Instituto de Robótica Médica en China y el Centro Hamlyn de Cirugía Robótica en Londres desarrollaron una plataforma microrobótica novedosa para funcionalizar fibras que van desde 140 a 830 micrómetros (µm). Luego alinearon los microbots de 2 mm x 3 mm y 200 µm de espesor con circuitos electrónicos flotantes en una fibra mediante un proceso de transferencia en húmedo.
Los científicos controlaron la posición y orientación de los microrobots en la interfaz aire-agua utilizando un imán permanente. Usando el campo magnético no homogéneo del imán, controlaron la distancia precisa entre los dos microrobots y facilitaron las maniobras de "agarrar y soltar" con patrones electrónicos flotantes. Barbot y col. propuso un modelo de este proceso de control, incluidas las interacciones de los microrobots a través de la tensión superficial para una validación detallada del rendimiento. Demostraron una variedad de ejemplos de formas de realización de sensores en una fibra de 200 µm de diámetro y dispositivos 3-D.
El énfasis clínico en la mejora de la vigilancia y el diagnóstico médicos ha orientado el futuro de la cirugía hacia una intervención de precisión. La reciente introducción de herramientas robóticas en fibras para formar fiberbots ha permitido a los investigadores combinar imágenes, detección y micromanipulación dentro de una sola fibra. Se pueden diseñar microgrippers sofisticados directamente en la punta de una fibra mediante polimerización de dos fotones. Los investigadores pueden establecer la microactivación mediante enlaces hidráulicos que aprovechan la función microcapilar para usar el dispositivo para la administración de fármacos dirigida y energía enfocada, como la ablación con láser. Las fibras ópticas son un sustrato versátil para desarrollar microherramientas flexibles. Sus superficies proporcionan una ubicación ideal para incluir múltiples sensores a lo largo de su longitud.
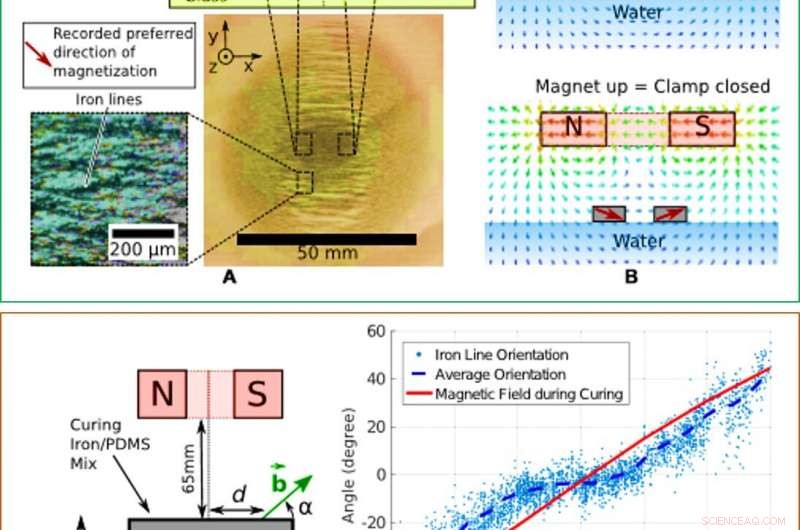
ARRIBA:Microrobots flotantes con diferentes direcciones de magnetización preferidas:Principios de fabricación y control. (A) Fabricación de microrobots. Se programaron diferentes direcciones de magnetización en el material con un anillo magnético. (B) Mecanismo de sujeción utilizado en este estudio. Los microrobots se movieron juntos o separados dependiendo de la posición vertical del imán, permitiendo transferir una sujeción efectiva del patrón, seguido de control de rotación y orientación. INFERIOR:Orientación de la línea de hierro dentro de la matriz PDMS. (A) Reconstrucción por micro-TC de la mezcla de polímero / hierro. Las líneas de hierro se alinean con la dirección del campo magnético durante el curado del polímero. (B) Dirección de la línea de hierro versus posición. La dirección de las líneas de hierro siguió la dirección del campo magnético de curado. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
Sin embargo, el modelado directo de la microelectrónica en pequeños, los objetos curvos utilizados para aplicaciones clínicas es un desafío, ya que los procesos de microfabricación existentes se adaptan principalmente a sustratos planos. Hasta ahora, los investigadores han utilizado dos métodos de transferencia principales; incluida la transferencia en seco y la técnica de transferencia en húmedo. La transferencia en seco generalmente ofrece una mejor limpieza y una mayor precisión en comparación con la transferencia en húmedo debido a la ausencia de grabado en húmedo y perturbación del fluido. Las técnicas de transferencia húmeda que pueden ocurrir en las intervenciones quirúrgicas están limitadas por las dificultades para colocar y recoger con precisión los dispositivos flotantes. Esto se debe a la falta de herramientas de precisión o plataformas robóticas para un enfoque práctico preciso. Por lo tanto, los manipuladores de microbot pueden abordar algunos de los principales problemas que enfrentan los métodos manuales de transferencia húmeda.
En el presente trabajo, Barbot y col. propuso el uso de microrobots móviles en la interfaz aire / agua para controlar con precisión el movimiento del patrón durante la transferencia húmeda. Para facilitar un control simple y preciso, los científicos propusieron desarrollar un par de microrobots para captar patrones flotantes. Lo lograron utilizando un campo magnético generado con un solo imán permanente acoplado para sintonizar la dirección de magnetización del material constituyente del robot. Barbot y col. utilizó la interacción entre los microrobots y el campo magnético para colocar el par de microrobot en dos sitios diferentes de la interfaz aire / agua y formar una pinza.
Agarre y manipulación de patrones basados en microrobot. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
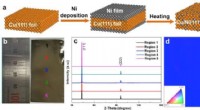
Los investigadores controlaron la distancia entre los dos microrobots controlando la distancia entre el dispositivo y el imán. Construyeron los dispositivos usando un elastómero y polidometilsiloxano (PDMS) mezclado con polvo de hierro. Para un experimento dado, Barbot y col. magnetizó cada microrobot para que reaccionara de manera similar a un campo magnético dado. Los científicos utilizaron una capa de 200 µm de PDMS y una mezcla de hierro bajo la influencia de un campo magnético débil para ensamblar líneas de hierro en la matriz de PDMS. Curaron térmicamente el PDMS para mantener las estructuras de la línea de hierro en su lugar y evaluaron la orientación del producto mediante microtomografía de rayos X.
Los científicos desarrollaron pares de microrobots con direcciones de magnetización personalizadas utilizando diferentes partes de las capas de hierro / PDMS para formar robots rectangulares de 2 mm por 3 mm con un grosor de 200 µm. Agregaron pequeñas estructuras similares a dientes a los microrobots para limitar el movimiento del patrón durante los procesos de agarre. El equipo observó las posiciones de diferentes pares de microrobot y su respectiva respuesta a diferentes posiciones verticales del imán para obtener dos patrones de movimiento para los pares de microrobot. dependiendo del ángulo (α) entre su magnetización y el plano horizontal.
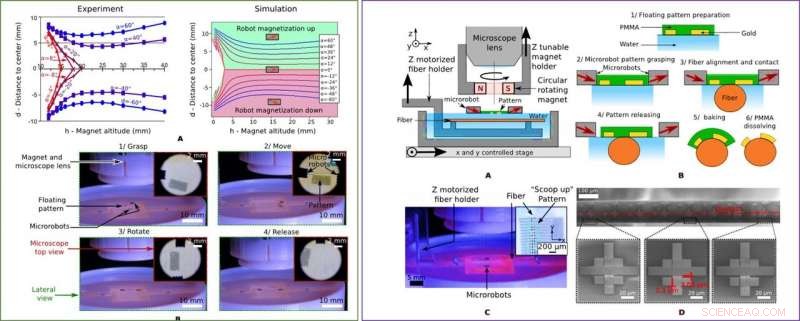
IZQUIERDA:Control magnético del par de microrobot. (A) Diferentes posiciones de equilibrio del par de microrobot según la influencia de la posición vertical del imán. Izquierda:resultados experimentales. Derecha:Resultados de simulación adquiridos mediante el modelado de elementos finitos del campo magnético. (B) Imágenes ópticas que muestran a la pareja de microrobot manipulando un patrón flotante. DERECHA:Patrones de fibras mediante transferencia húmeda asistida por microrobot. (A) Vista lateral de la piscina de transferencia con el par de microrobot sosteniendo un patrón para ser transferido. (B) Flujo de trabajo de fabricación para modelar microdispositivos de Au en la fibra utilizando la transferencia húmeda asistida por microrobot propuesta. (C) Patrón flotante (estructuras de rejilla) transferido a una fibra óptica de 200 µm de diámetro como se ve desde el microscopio. (D) Imágenes de microscopía electrónica de barrido (SEM) (Tescan SEM / FIB LYRA3 XM) de dos marcadores de posición de transferencia sucesivos para evaluar la precisión de transferencia alcanzable del sistema propuesto. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
Barbot y col. diseñó los microrobots y permitió que la altura del imán controle la distancia entre los dos robots y regule la apertura y cierre de las pinzas de los microrobot. Los científicos compararon los resultados experimentales con una simulación para comprender la interacción entre los microrobots. Observaron cuatro grados de libertad (DOF) para controlar los pares de microrobot. Estos incluyeron agarrar (un DOF), posicionamiento (dos DOF) y orientaciones (un DOF) durante la transferencia húmeda. Los científicos manipularon el patrón flotante utilizando estas cuatro entradas controlables. Caracterizaron la propiedad de magnetización de la mezcla de hierro / PDMS como una guía general para diseños consistentes de microrobot.
Durante los experimentos, El equipo primero bajó el imán para separar los microrobots y colocarlos alrededor del patrón objetivo. Luego levantaron el imán para cerrar el espacio entre los microrobots y agarrar el patrón para la alineación posterior con el sustrato de fibra objetivo. La fuerza de agarre de los microrobots no provocó ninguna deformación del patrón. Finalmente, bajaron el imán de nuevo para que la pinza soltara el patrón y alejara el par de robots. Usando la configuración, los investigadores realizaron una transferencia húmeda del patrón flotante a una fibra óptica. Durante los seis pasos, proceso de fabricación de microrobot, los científicos transfirieron patrones arbitrarios de oro (Au), como electrodos o galgas extensométricas, a la fibra. Para comprender la precisión de la transferencia de patrones, midieron el desplazamiento entre dos patrones complementarios depositados en la fibra. Barbot y col. observaron desafíos para la adhesión de patrones a largo plazo en ubicaciones de contacto curvas de la fibra.
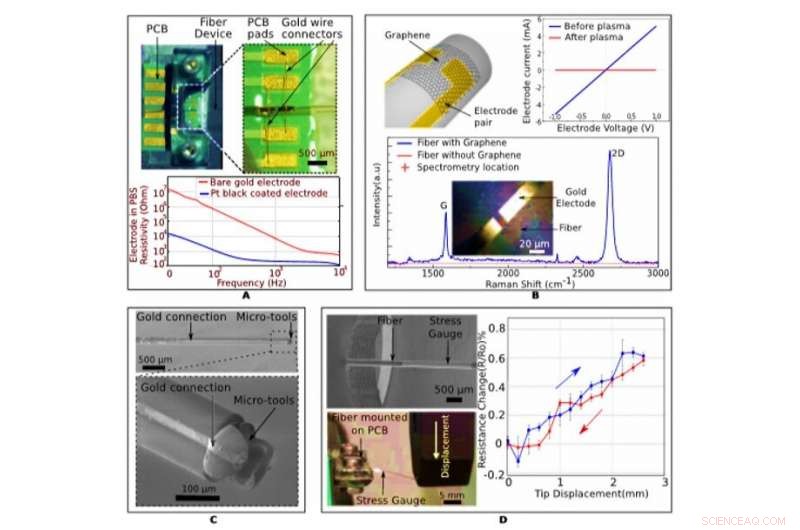
Ejemplos de aplicaciones de transferencia húmeda asistida por microbot para la funcionalización de fibras. (A) Arriba:Interfaz entre electrodos soportados por fibra y una PCB dedicada. Abajo:Caracterización de impedancia de un dispositivo de dos electrodos con y sin electrodeposición de Pt negro. (B) Dispositivos de grafeno 2D basados en fibra. Se realizaron transferencias secuenciales en húmedo para modelar sucesivamente la pista de Au y luego la película de grafeno. La presencia de grafeno se evaluó con espectrometría Raman y una prueba destructiva de plasma. (C) Imagen SEM de una microherramienta funcionalizada impresa en 3D en la punta de una fibra. La pista de Au se alineó y se transfirió a la estructura 3D con buena conformidad. (D) Medidor de tensión basado en fibra diseñado para medir la deformación de la fibra en función de su cambio de resistividad. Imagen SEM del dispositivo, imagen de la experiencia, y señal resultante. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
El equipo optimizó el método de transferencia en húmedo asistido por microrobot propuesto para diseñar una variedad de dispositivos. Formaron dispositivos electrónicos transfiriendo fibras con patrones a una placa de circuito impreso y realizaron conexiones eléctricas utilizando cables de Au de 25 µm. Formaron estos sensores electroquímicos para aplicaciones potenciales en microcatéteres y otros dispositivos implantables. Los científicos también demostraron la técnica de fabricación utilizando varias capas de diferentes materiales para formar un dispositivo de grafeno de dos terminales en una fibra de vidrio de 200 µm de diámetro. Eligieron el grafeno debido a las propiedades de electrodo únicas del material. Utilizaron el método para integrar dispositivos electromecánicos activos en sustratos 3-D, seguido de la creación de patrones en estructuras tridimensionales complejas. Por ejemplo, transfirieron un patrón de Au en una microherramienta con punta de fibra capilar de vidrio de 170 µm (diseñada mediante litografía de dos fotones). El trabajo allanará el camino para diseñar dispositivos electromecánicos complejos a microescala utilizando técnicas de microfabricación híbrida con amplias aplicaciones durante la detección precisa de biomarcadores clínicos y la cirugía de precisión.
De este modo, Antoine Barbot y un equipo de investigadores interdisciplinarios presentaron una solución práctica para transferir en húmedo películas delgadas y cristales 2-D con precisión de nivel micrométrico sobre sustratos 3-D. Desarrollaron un microbot magnético flotante capaz de almacenar una dirección de magnetización preferida para manipularlos bajo un campo magnético permanente. El equipo de investigación afinó la micro pinza robótica ajustando la posición del imán para agarrar, alinee y suelte patrones bidimensionales flotantes.
La configuración propuesta es simple, reproducible y confiable. La nueva técnica de fabricación abrirá nuevas aplicaciones en cirugía intervencionista con sensores electroquímicos, microactuadores y dispositivos electrónicos complejos en 2-D. El enfoque futuro de Barbot et al. incluirá dispositivos jerárquicos de ingeniería basados en cristales multicapa de van der Waals 2-D para integrar componentes activos en las puntas de las fibras y, en última instancia, formar robots de fibra basados en la capacidad de activación y detección a nanoescala o microescala.
© 2019 Science X Network