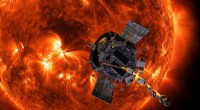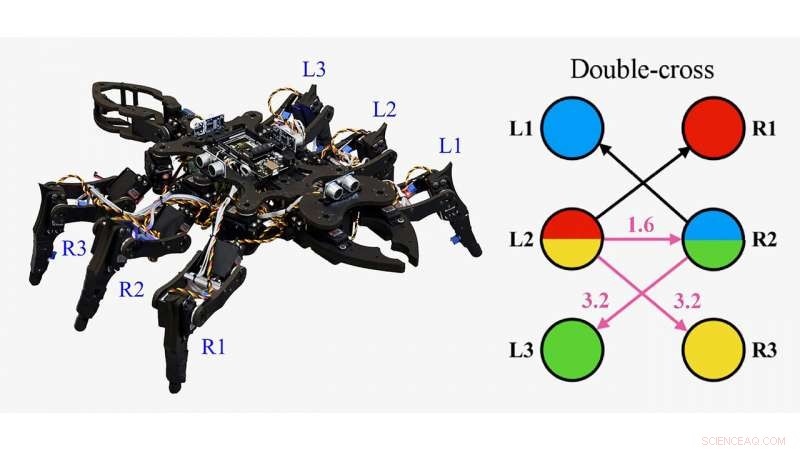
Investigadores en Japón e Italia están adoptando el caos y la física no lineal para crear andares de insectos para pequeños robots, con un controlador de locomoción para proporcionar una interfaz cerebro-máquina. Vista de su robot experimental y esquemas de acoplamiento para sus andares. Crédito:Ludovico Minati
Investigadores en Japón e Italia están adoptando el caos y la física no lineal para crear andares de insectos para pequeños robots, con un controlador de locomoción para proporcionar una interfaz cerebro-máquina.
La biología y la física están impregnadas de fenómenos universales que se basan fundamentalmente en la física no lineal, e inspiró el trabajo de los investigadores.
En el diario Caos , el grupo describe el uso del sistema Rössler, un sistema de tres ecuaciones diferenciales no lineales, como un bloque de construcción para los generadores de patrones centrales (CPG) para controlar la marcha de un insecto robótico.
"La naturaleza universal de los fenómenos subyacentes nos permitió demostrar que la locomoción se puede lograr mediante combinaciones elementales de sistemas de Rössler, que representan una piedra angular en la historia de los sistemas caóticos, "dijo Ludovico Minati, del Instituto de Tecnología de Tokio y la Universidad de Trento.
Los fenómenos relacionados con la sincronización permiten al grupo crear redes muy simples que generan patrones rítmicos complejos.
"Estas redes, CPG, son la base de la locomoción con patas en todas partes de la naturaleza, " él dijo.
Los investigadores comenzaron con una red minimalista en la que cada instancia está asociada con una pierna. Se puede cambiar el modo de andar o crear uno nuevo simplemente haciendo pequeños cambios en el acoplamiento y los retrasos asociados.
En otras palabras, La irregularidad se puede agregar haciendo que los sistemas individuales o toda la red sean más caóticos. Para sistemas no lineales, un cambio de salida no es proporcional a un cambio de entrada.
Este trabajo muestra que el sistema Rössler, más allá de sus muchas propiedades interesantes e intrincadas, "también se puede utilizar con éxito como sustrato para construir un controlador de locomoción bioinspirado para un robot insecto, "Dijo Minati.
Su controlador está construido con un electroencefalograma para permitir una interfaz cerebro-computadora.
"Se registra la actividad neuroeléctrica de una persona y se utilizan conceptos no lineales de sincronización de fase para extraer un patrón, ", dijo Minati." Este patrón se utiliza luego como base para influir en la dinámica de los sistemas de Rössler, que generan el patrón de marcha del robot insecto ".
Los investigadores aprovechan dos veces las ideas fundamentales de la dinámica no lineal.
"Primero, los usamos para decodificar la actividad biológica, luego en la dirección opuesta para generar actividad bioinspirada, " él dijo.
La implicación clave de este trabajo es que "demuestra la generalidad de conceptos dinámicos no lineales como la capacidad del sistema de Rössler, que a menudo se estudia en un escenario abstracto, "Minati dijo, "pero se utiliza aquí como base para generar patrones biológicamente plausibles".