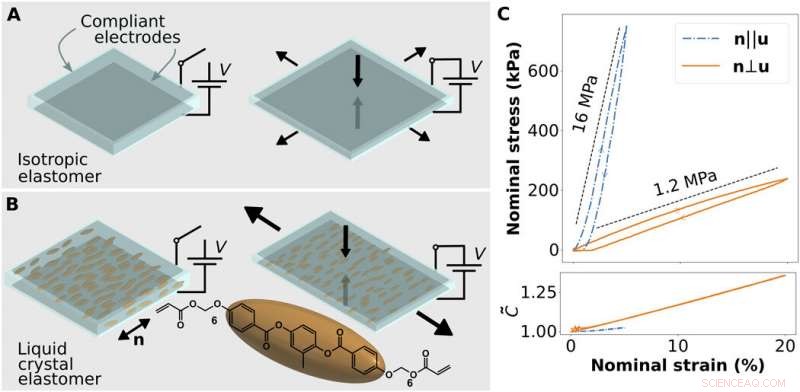
Esquema del dispositivo, mecánico, y caracterización eléctrica. (A) Esquema de un actuador DE isotrópico tradicional en estados de apagado y encendido. (B) Esquema de un actuador LCE dieléctrico alineado uniaxial (DLCEA) en estados de apagado y encendido. Alineación molecular de cristal líquido; el director, norte, se indica con una flecha de dos puntas y define la dirección más rígida del LCE. Cuando es accionado por un voltaje, V, el material se adelgaza y se estira perpendicularmente a la alineación más que paralelo al director. (C) El esfuerzo mecánico de DLCEA y la respuesta de capacitancia normalizada (C∼) a la tensión sobre el régimen lineal de DLCEA se caracterizan a una tasa de tensión de 0,1% por segundo. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Los científicos de materiales tienen como objetivo utilizar robots blandos bioinspirados para llevar a cabo interacciones avanzadas entre humanos y robots. pero la tecnología asociada queda por desarrollar. Por ejemplo, Los actuadores suaves deben funcionar rápidamente con fuerza para producir cambios de forma programables y los dispositivos deben ser fáciles de fabricar y energéticamente eficientes para aplicaciones sin ataduras. En un nuevo informe sobre Avances de la ciencia , Zoey S. Davidson y un equipo de investigación interdisciplinario en los departamentos de Inteligencia Física, Ciencia e Ingeniería de los Materiales, y la Facultad de Medicina de Alemania, Estados Unidos y Turquía, combinó varias características de interés utilizando dos sistemas de materiales activos distintos para construir robots blandos.
Los científicos integraron una actuación rápida y altamente eficiente con elastómeros dieléctricos (DE) y una programabilidad de forma dirigida utilizando elastómeros de cristal líquido (LCE). Usando técnicas de fotoalineación de arriba hacia abajo, Luego programaron la alineación molecular y localizaron la anisotropía elástica gigante en los elastómeros de cristal líquido. Los investigadores desarrollaron monolitos de elastómero de cristal líquido accionados linealmente con tasas de deformación superiores al 120 por ciento, por segundo, y una eficiencia de conversión de energía del 20 por ciento cuando se mueven cargas por encima de 700 veces el peso del elastómero. El mecanismo permitirá nuevas oportunidades de investigación en programabilidad y eficiencia de formas miniaturizadas junto con mayores grados de libertad para aplicaciones en robótica blanda en investigación multidisciplinaria.
Los investigadores de robótica de materiales consideran que los actuadores compatibles son la clave que falta para formar interfaces eficientes entre humanos y robots. Los actuadores suaves compatibles serán idealmente altamente eficientes, mantener la relación fuerza-peso, capacidad de trabajo y programabilidad de formas para completar funciones complejas. Los actuadores blandos con tales propiedades funcionarán como un músculo artificial con aplicaciones avanzadas en la industria aeroespacial, robótica, dispositivos médicos, dispositivos de recolección de energía y wearables. Entre las variedades de actuadores blandos exploradas, Los elastómeros dieléctricos (DE) son los más prometedores. En paralelo, Los elastómeros de cristal líquido (LCE) pueden sufrir una deformación mecánica reversible mediante el uso de luz y activación térmica cerca de la temperatura de transición de fase. Los avances en fotoalineación y microfabricación han permitido a los científicos preprogramar la alineación de cristal líquido en regiones microscópicas para la transformación de formas complejas. Sin embargo, los mecanismos existentes requieren métodos de fabricación de varios pasos, mientras que los esfuerzos para transportar energía eléctrica al trabajo mecánico utilizando LCE son limitados debido a la pequeña tensión que generan.
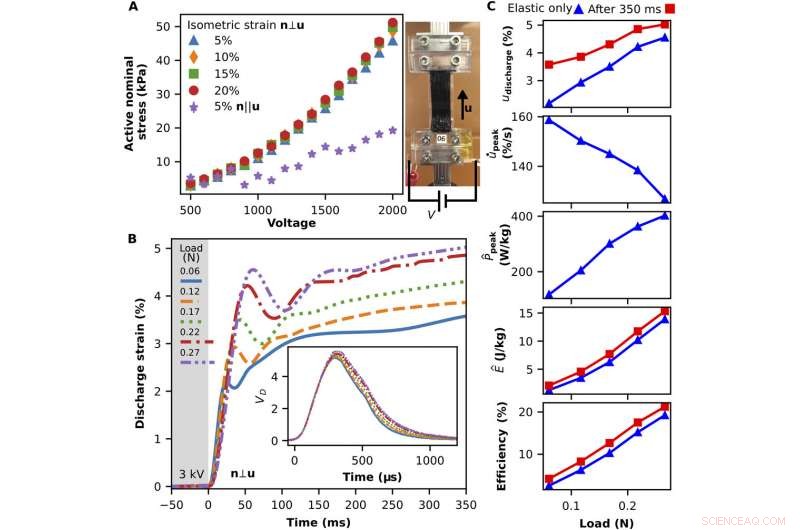
La caracterización de DLCEA uniaxial demuestra las capacidades de un dispositivo actuador DLCEA. (A) Pruebas isométricas (deformación constante). Reducción de tensión nominal activa medida con varias deformaciones isométricas iniciales (u) para dispositivos ensamblados con el director LCE n⊥u y n‖u y una fotografía de un dispositivo DLCEA ensamblado con n⊥u. (B) Pruebas isotónicas (fuerza constante). Trayectorias de deformación de descarga contráctil bajo diversas cargas medidas por una cámara de alta velocidad con voltajes de actuación de 3 kV. Recuadro:Las correspondientes medidas de descarga eléctrica. (C) Las características fundamentales del actuador se calculan a partir de la trayectoria de contracción y la medición de la corriente de descarga que se encuentra en (B), incluida la cepa (u), tasa de deformación máxima (u˙peak), potencia específica de pico (Pˆpeak), energía específica (Eˆ), y eficiencia. Créditos de las fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
En el presente trabajo, Davidson y col. LCE (elastómeros de cristal líquido) modelados para adaptar la variación espacial de la elasticidad mecánica (transferir una fuerza de entrada y el desplazamiento a través de la deformación del cuerpo elástico) y desarrollar actuadores de elastómero dieléctrico más efectivos con preprogramabilidad y dirección de actuación (compresión). En general, Los actuadores DE (elastómero dieléctrico) funcionan utilizando atracción electrostática entre dos electrodos compatibles creados en lados opuestos de un DE isotrópico para diseñar un resistor-condensador variable. El alto voltaje aplicado a los electrodos compatibles puede inducir una presión electrostática conocida como tensión de Maxwell para deformar el DE; para accionamiento eléctrico. Este mecanismo puede producir una mayor eficiencia operativa y una mayor velocidad de actuación que las de los LCE. Sin embargo, a pesar de algunos resultados impresionantes, Los actuadores DE aún no han ganado un uso generalizado en robótica blanda debido a los desafíos existentes que se pueden superar utilizando materiales innovadores para construir la próxima generación, ED de alto rendimiento con programabilidad de formas.
Davidson y col. exploró directamente la gran anisotropía mecánica (para mejorar la localización de deformaciones) de los materiales LCE mediante activación eléctrica, sin depender de la rotación molecular. Incluyeron avances recientes en la ciencia de los materiales para construir ED altamente eficientes y programables en forma; denominados actuadores dieléctricos LCE (DLCEA). Los científicos alinearon moléculas de LCE en dominios locales para lograr una actuación impulsada por electricidad y permitir la transformación de formas a temperatura ambiente para demostrar grandes, Cepas rápidas y contundentes.
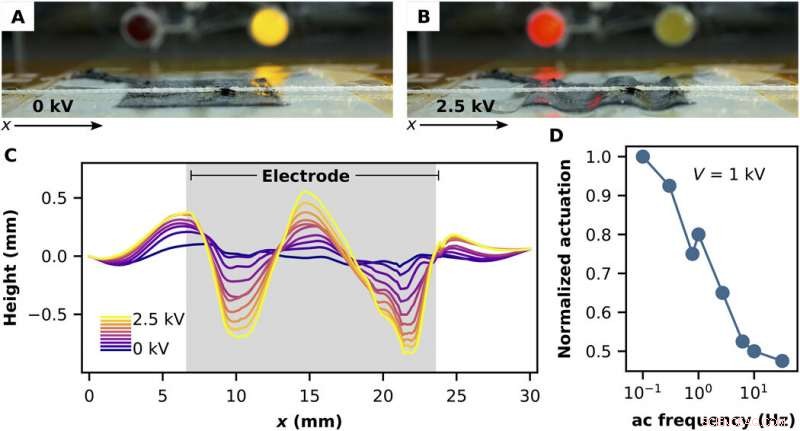
Pandeo uniaxial fuera del plano DLCEA. (A) Apagado y (B) encendido estados de un dispositivo DLCEA uniaxial con condición de límite fija. La expansión a lo largo de la dirección suave crea pandeo fuera del plano, que desplaza un hilo fino que se mantiene tenso a lo largo de la superficie. (C) Medición experimental del pandeo en función del voltaje aplicado. (D) Respuesta de frecuencia de pandeo DLCEA uniaxial a 1 kV. La amplitud de actuación de 0,1 Hz es de aproximadamente 130 μm. Créditos de las fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
El equipo de investigación desarrolló las películas LCE en un proceso de dos pasos; primero, desarrollaron brevemente un oligómero, seguido de la fabricación de la película LCE usando una reacción de clic de tiol-acrilato. Ajustaron la proporción exacta de componentes, la elección del conector de monómero y ditiol, para ajustar las propiedades mecánicas deseadas de la película LCE final. El trabajo produjo grandes áreas de LCE uniaxial bien ordenado con gran anisotropía elástica. Los científicos aplicaron electrodos de grasa compatibles a ambos lados de la película LCE para crear los dispositivos DLCEA (actuador dieléctrico LCE).
Davidson y col. luego caracterizaron (probaron) los materiales partiendo de películas LCE alineadas uniaxialmente de monodominio. Próximo, probaron los DLCEA uniaxiales en configuraciones isométricas (deformación constante) e isotónicas (fuerza constante). Por ejemplo, durante las pruebas isométricas, aplicaron tensiones iniciales a los dispositivos DLCEA y permitieron la relajación antes de aplicar un alto voltaje para la activación eléctrica. Durante las pruebas de isopotencial (donde cada punto de una región o espacio tiene el mismo potencial), los científicos tensaron el DLCEA bajo un voltaje constante para indicar la actuación esperada.
Demostración de pandeo uniaxial DLCEA. Un DLCEA alineado uniaxialmente se dobla cuando se carga con un potencial de 2,5 kV y luego se aplana cuando se descargan los electrodos. La cuerda que se sostiene sobre el DLCEA ayuda a visualizar la actuación, pero también se desplaza ligeramente por el pandeo. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Usando el mismo DLCEA, El equipo de investigación realizó pruebas isotónicas suspendiendo una variedad de pesos del extremo libre del dispositivo para generar fuerzas de carga constantes y deformaciones nominales iniciales. Luego descargaron abruptamente el dispositivo DLCEA ponderado y capturaron el movimiento subsiguiente usando un video de alta velocidad. A medida que aumentaba la carga y la deformación experimentales, la capacitancia de DLCEA aumentó.
Durante la actuación de formas complejas, Las condiciones de contorno jugaron un papel importante para determinar el cambio de forma de DLCEA. El equipo de investigación comprendió el papel de las condiciones de contorno al caracterizar el efecto de pandeo causado por la expansión del elastómero entre límites fijos. observaron un aumento de la amplitud de pandeo con el aumento de voltaje. El pico de actuación también fue otra característica de interés para las aplicaciones DLCEA, Los científicos midieron el cambio en la amplitud de actuación en función de la frecuencia aplicada utilizando un potencial de 1 kV que variaba sinusoidalmente. Aunque la amplitud de actuación decayó exponencialmente con la frecuencia, los investigadores midieron los parámetros (50 µm) a 30 Hz y 1 kV.
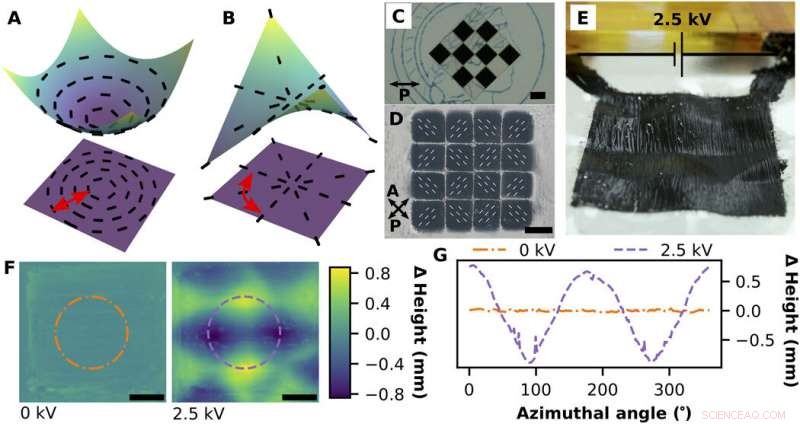
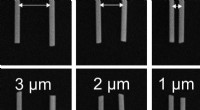
DLCEA pixelado. Actuación de forma programada, como una deformación del patrón de hoyuelos, es posible modelando la configuración del director en una celosía de defecto azimutal-radial. (A) Los tipos de defectos azimutales se deforman en un cono con curvatura gaussiana localmente positiva, y (B) los tipos de defectos radiales se deforman en un anticono con curvatura gaussiana localmente negativa (en forma de silla de montar). En (A) y (B), las flechas rojas de dos puntas indican la dirección suave. (C) Los defectos se modelan utilizando una matriz pixelada de películas polarizadoras con las orientaciones locales diseñadas. (D) Visto a través de polarizadores cruzados, la película LCE fabricada tiene una alineación uniaxial pixelada, indicado por líneas blancas discontinuas, formando una celosía de defectos. (E) Cuando se carga a 2,5 kV, hay una gran deformación visible de la superficie. (F) El mapa de altura medida por perfilometría del LCE cubierto de grasa es casi plano sin carga y varía más de 1,6 mm cuando se carga a 2,5 kV. Los círculos de guiones y puntos y guiones en (F) son trazos de altura representados en (G). El cambio de una altura aproximadamente constante a una altura variable sinusoidalmente indica un cambio en el signo de la curvatura gaussiana local. Barras de escala, 4 mm. Créditos de las fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Para luego demostrar la capacidad de preprogramar patrones complejos en 2-D, seguido de la activación eléctrica de las películas en formas tridimensionales, los científicos diseñaron configuraciones de director de LCE que varían espacialmente. Observaron que la película de LCE se deformaba fuera del plano con una curvatura gaussiana localmente positiva o negativa para formar conos o deformaciones anticonicas en los medios elásticos. Davidson y col. observó el cambio de altura programado localmente y la formación acompañante de curvatura gaussiana en el dispositivo experimental. Los investigadores atribuyen la alta eficiencia observada en el sistema a la anisotropía del módulo elástico y la relación de Poisson. La anisotropía de la relación de Poisson del material es una característica importante que puede permitir la activación programada del cambio de forma. Por mecanismo, el LCE accionado o comprimido puede expandirse transversalmente para crear un cambio de forma. El método experimental desarrollado en este trabajo se puede generalizar para crear una gran variedad de cambios de forma programables. Como consecuencia, cuando se aplica un campo eléctrico a la DLCEA, el dispositivo puede producir movimientos torcidos, donde la magnitud dependerá de las propiedades intrínsecas del material y de la geometría LCE.
De este modo, Zoey S. Davidson y sus colegas combinaron las características deseadas de los DE y LCE dentro de una plataforma de material único para formar DLCEA accionados eléctricamente con un rendimiento de actuación superior. Los dispositivos mostraron una alta eficiencia de conversión de energía (20 por ciento), una alta velocidad de actuación (120 por ciento por segundo) y un cambio de forma programable de 2-D a 3-D con más de 1, 800 por ciento de carrera fuera del plano. Para fuerzas de actuación mayores, el equipo de investigación considera pilas DLCEA multicapa.
Los conocimientos proporcionados en este trabajo sobre las técnicas de integración de materiales activos y los mecanismos de electroacción pueden ofrecer oportunidades más interesantes. Los métodos se pueden combinar con la impresión 3D, Estrategias de actuación de origami y kirigami para crear robots blandos multifuncionales con materiales sostenibles y de bajo costo como invenciones frugales. El mecanismo desarrollado también se puede aplicar a otras tecnologías como la recolección y el almacenamiento de energía, para dispositivos médicos, tecnología portátil y aeroespacial.
© 2019 Science X Network