Crédito:Universidad de Washington
Al comienzo de la pandemia de COVID-19, las empresas de fabricación de automóviles como Ford cambiaron rápidamente su enfoque de producción de automóviles a máscaras y ventiladores.
Para hacer posible este cambio, estas empresas confiaron en personas que trabajaban en una línea de montaje. Hubiera sido demasiado desafiante para un robot hacer esta transición porque los robots están atados a sus tareas habituales.
Teóricamente, un robot podría recoger casi cualquier cosa si sus pinzas pudieran intercambiarse para cada tarea. Para mantener los costos bajos, estas pinzas podrían ser pasivas, lo que significa que las pinzas recogen objetos sin cambiar de forma, de forma similar a como funcionan las pinzas en una carretilla elevadora.
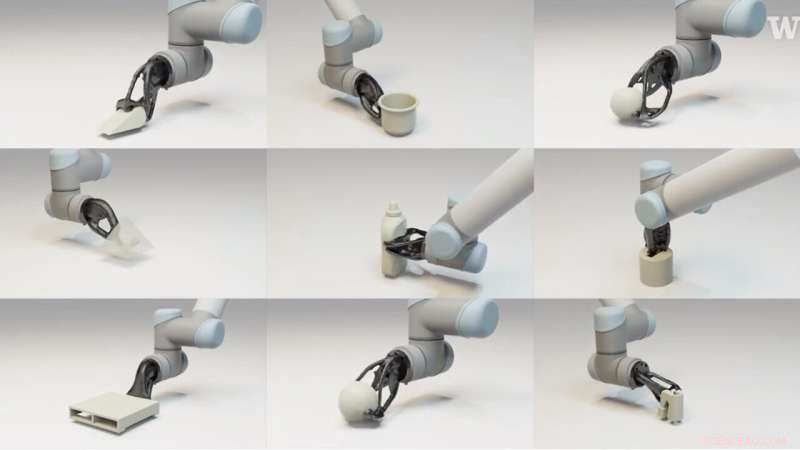
Un equipo de la Universidad de Washington ha creado una nueva herramienta que puede diseñar una pinza pasiva imprimible en 3D y calcular la mejor ruta para recoger un objeto. El equipo probó este sistema en un conjunto de 22 objetos, incluido un conejito impreso en 3D, una cuña en forma de tope de puerta, una pelota de tenis y un taladro. Las pinzas y caminos diseñados fueron exitosos para 20 de los objetos. Dos de estos eran la cuña y una forma de pirámide con un ojo de cerradura curvo. Ambas formas son difíciles de recoger para varios tipos de pinzas.
El equipo presentará estos hallazgos el 11 de agosto en SIGGRAPH 2022.
"Todavía producimos la mayoría de nuestros artículos con líneas de ensamblaje, que son realmente geniales pero también muy rígidas. La pandemia nos mostró que necesitamos una forma de reutilizar fácilmente estas líneas de producción", dijo la autora principal Adriana Schulz, profesora asistente de la UW. en la Escuela de Informática e Ingeniería Paul G. Allen. "Nuestra idea es crear herramientas personalizadas para estas líneas de fabricación. Eso nos brinda un robot muy simple que puede realizar una tarea con una pinza específica. Y luego, cuando cambio la tarea, simplemente reemplazo la pinza".
Las pinzas pasivas no se pueden ajustar para adaptarse al objeto que recogen, por lo que, tradicionalmente, los objetos se han diseñado para que coincidan con una pinza específica.
"La pinza pasiva más exitosa del mundo son las pinzas de un montacargas. Pero la contrapartida es que las pinzas de montacargas solo funcionan bien con formas específicas, como tarimas, lo que significa que cualquier cosa que desee sujetar debe estar en una tarima", dijo coautor Jeffrey Lipton, profesor asistente de ingeniería mecánica de la UW. "Aquí estamos diciendo 'Está bien, no queremos predefinir la geometría de la pinza pasiva'. En su lugar, queremos tomar la geometría de cualquier objeto y diseñar una pinza".
Para cualquier objeto dado, hay muchas posibilidades de cómo podría verse su pinza. Además, la forma de la pinza está vinculada a la ruta que toma el brazo del robot para recoger el objeto. Si se diseña incorrectamente, una pinza podría chocar contra el objeto en el camino para recogerlo. Para abordar este desafío, los investigadores tenían algunas ideas clave.
"Los puntos donde la pinza hace contacto con el objeto son esenciales para mantener la estabilidad del objeto en el agarre. Llamamos a este conjunto de puntos 'configuración de agarre'", dijo el autor principal, Milin Kodnongbua, quien completó esta investigación como estudiante de pregrado de la UW. en la Escuela Allen. "Además, la pinza debe hacer contacto con el objeto en esos puntos dados, y la pinza debe ser un único objeto sólido que conecte los puntos de contacto con el brazo del robot. Podemos buscar una trayectoria de inserción que satisfaga estos requisitos".
Al diseñar una pinza y una trayectoria nuevas, el equipo comienza proporcionando a la computadora un modelo 3D del objeto y su orientación en el espacio, por ejemplo, cómo se presentaría en una cinta transportadora.
"Primero, nuestro algoritmo genera posibles configuraciones de agarre y las clasifica en función de la estabilidad y algunas otras métricas", dijo Kodnongbua. "Luego, toma la mejor opción y la co-optimiza para encontrar si es posible una trayectoria de inserción. Si no puede encontrar una, pasa a la siguiente configuración de agarre en la lista e intenta hacer la co-optimización nuevamente".
Una vez que la computadora ha encontrado una buena coincidencia, genera dos conjuntos de instrucciones:uno para una impresora 3D para crear la pinza y otro con la trayectoria para el brazo del robot una vez que la pinza está impresa y conectada.
El equipo eligió una variedad de objetos para probar el poder del método, incluidos algunos de un conjunto de datos de objetos que son el estándar para probar la capacidad de un robot para realizar tareas de manipulación.
"También diseñamos objetos que serían un desafío para los robots de agarre tradicionales, como objetos con ángulos muy bajos u objetos con agarre interno, donde tienes que levantarlos con la inserción de una llave", dijo el coautor Ian Good, un Estudiante de doctorado de la UW en el departamento de ingeniería mecánica.
Los investigadores realizaron 10 pastillas de prueba con 22 formas. Para 16 formas, las 10 recolecciones fueron exitosas. Si bien la mayoría de las formas tuvieron al menos una recolección exitosa, dos no la tuvieron. Estas fallas se debieron a problemas con los modelos 3D de los objetos que se entregaron a la computadora. Para uno, un tazón, el modelo describió los lados del tazón como más delgados de lo que eran. Para el otro, un objeto que parece una taza con un asa en forma de huevo, el modelo no tenía la orientación correcta.
El algoritmo desarrolló las mismas estrategias de agarre para objetos de forma similar, incluso sin intervención humana. Los investigadores esperan que esto signifique que podrán crear pinzas pasivas que puedan recoger una clase de objetos, en lugar de tener que tener una pinza única para cada objeto.
Una limitación de este método es que las pinzas pasivas no pueden diseñarse para recoger todos los objetos. Si bien es más fácil agarrar objetos que varían en ancho o tienen bordes sobresalientes, los objetos con superficies uniformemente lisas, como una botella de agua o una caja, son difíciles de agarrar sin partes móviles.
Aún así, a los investigadores les animó ver que el algoritmo funcionaba tan bien, especialmente con algunas de las formas más difíciles, como una columna con un ojo de cerradura en la parte superior.
"La ruta que ideó nuestro algoritmo para eso es una aceleración rápida hasta donde se acerca mucho al objeto. Parecía que iba a estrellarse contra el objeto, y pensé:"Oh, no. ¿Qué pasa si no lo calibramos bien?'”, dijo Good. “Y luego, por supuesto, se acerca increíblemente y luego lo capta perfectamente. Fue este momento impresionante, una montaña rusa extrema de emociones".
Yu Lou, quien completó esta investigación como estudiante de maestría en la Escuela Allen, también es coautor de este artículo.