Crédito:Ji et al.
Investigadores de la Universidad de California, Berkeley (UC Berkeley), la Universidad de Montreal y Mila han desarrollado recientemente un marco de aprendizaje de refuerzo jerárquico para mejorar la precisión de los robots cuadrúpedos en los tiros de fútbol. Este marco, presentado en un artículo publicado previamente en arXiv, se implementó en un Unitree A1, un robot cuadrúpedo desarrollado por UnitreeRobotics.
"Las piernas humanas no son solo para la locomoción, sino que también se pueden usar para la manipulación, como jugar al fútbol, y queremos permitir que los robots cuadrúpedos también logren esta capacidad", dijo a TechXplore Zhongyu Li, uno de los investigadores que llevó a cabo el estudio. "Hay una liga notable en la comunidad de robótica llamada 'RoboCup' (Copa Mundial de Robots), que ha estado invitando a investigadores a entrenar a sus robots para jugar partidos de fútbol durante décadas".
Los avances recientes han permitido la creación de hardware más confiable y algoritmos de control avanzados para robots. Como resultado, los robots ahora son más ágiles y podrían abordar tareas más complejas, como jugar al fútbol junto a los humanos. El marco desarrollado por Li y sus colegas podría ayudar a mejorar la capacidad de los robots cuadrúpedos para lanzar el balón durante los partidos de fútbol.
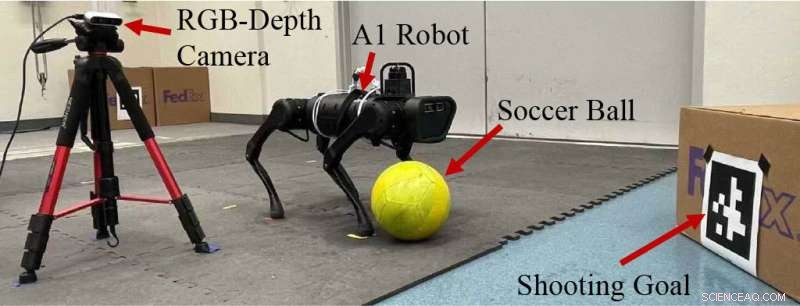
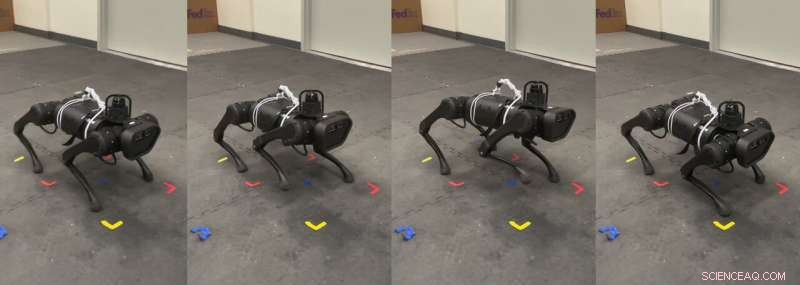
El nuevo marco tiene dos componentes clave:una política de control de movimiento y una política de planificación de movimiento. El componente de control de movimiento permite que el robot siga una trayectoria arbitraria para el dedo del pie en su pierna que patea. La política de planificación de movimiento, por otro lado, selecciona una trayectoria de punta óptima para disparar una pelota de fútbol cercana (detectada por una cámara externa) a una ubicación objetivo (por ejemplo, el poste de la portería).
Crédito:Ji et al.
"Nuestro diseño nos permite separar el desafío de la tarea precisa de tiros de fútbol en dos subtareas:control y planificación", dijo Li. "Primero podemos enfocarnos en entrenar una política de control robusta que pueda funcionar en el hardware, luego reutilizar dicho controlador para aprender la estrategia de planificación. Para disparar la pelota con precisión a los objetivos en el mundo real, el planificador se entrena usando la estrategia real". -datos mundiales cuando el robot está disparando el balón de fútbol real".
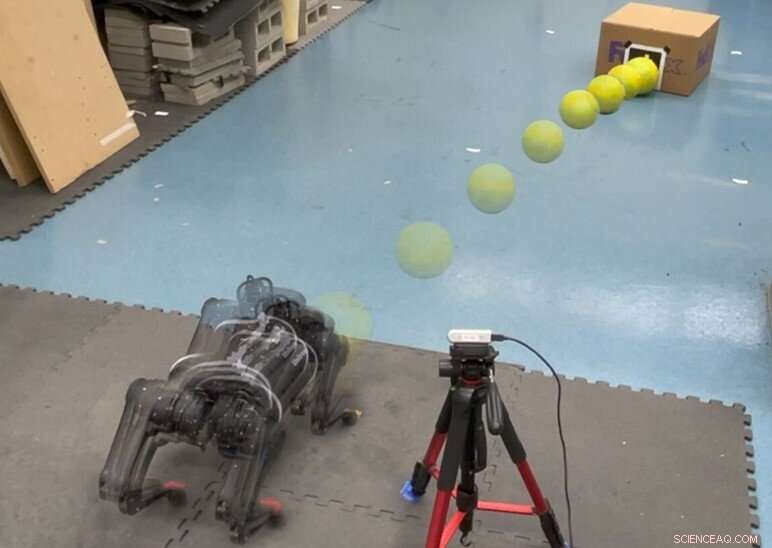
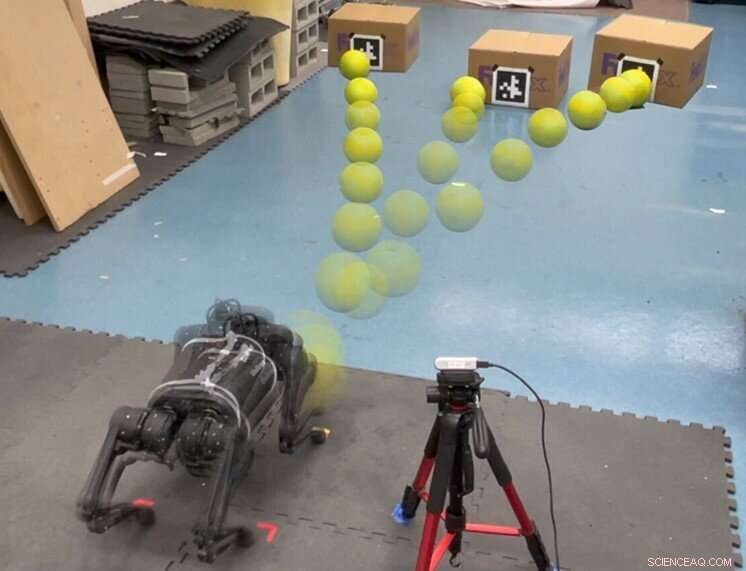
Li y sus colegas probaron su marco en una serie de pruebas del mundo real, utilizando un robot cuadrúpedo A1. Descubrieron que permitía al robot disparar una pelota de fútbol deformable a objetivos aleatorios con alta precisión. Esta es una tarea muy compleja de abordar, ya que el robot necesita balancear su pierna para patear rápidamente y ganar impulso sin perder el equilibrio.
"La pelota de fútbol presenta más desafíos porque el robot necesita lidiar no solo con el contacto suave difícil de modelar con la pelota deformable, sino también con las incertidumbres de la fricción rodante entre la pelota y el suelo", dijo Li. "La metodología que desarrollamos para abordar estos problemas podría ser potencialmente útil para las tareas en las que los robots dinámicos, como los robots con patas, tienen que interactuar con objetos blandos, como pelotas, cuerdas, correas, ropa, etc."

Crédito:Ji et al.
Crédito:Ji et al.
Crédito:Ji et al.
En el futuro, el marco creado por este equipo de investigadores podría usarse para mejorar el rendimiento de los robots en los torneos de fútbol, particularmente Robocup. Mientras tanto, Li y sus colegas planean diseñar otros marcos y modelos de aprendizaje automático para mejorar el rendimiento de los robots en otros elementos del fútbol.
"Nuestro objetivo a largo plazo es desarrollar jugadores de fútbol robóticos cuadrúpedos que algún día puedan competir con los humanos", agregó Li. "Estamos desarrollando habilidades de fútbol más complejas usando robots cuadrúpedos y, con suerte, en un futuro cercano, podemos comenzar un juego de fútbol completamente autónomo usando robots cuadrúpedos".
© 2022 Red Ciencia X Un algoritmo Q-learning para generar tiros para robots que caminan en simulaciones de fútbol