Ilustración conceptual de la prenda robótica propuesta. Crédito:Jonathan Realmuto/UCR
Los ingenieros de UC Riverside están desarrollando "ropa" robótica de bajo costo para ayudar a los niños con parálisis cerebral a controlar los movimientos de sus brazos.
La parálisis cerebral es la causa más común de discapacidad física grave en la infancia, y los dispositivos previstos para este proyecto están destinados a ofrecer asistencia diaria a largo plazo para quienes viven con ella.
Sin embargo, los robots tradicionales son rígidos y no se sienten cómodos en el cuerpo humano. Habilitado por una subvención de $ 1,5 millones de la Fundación Nacional de Ciencias, este proyecto adopta el enfoque novedoso de construir dispositivos a partir de textiles suaves, lo que también facilitará el funcionamiento más natural de las extremidades.
"Los materiales duros no interactúan bien con los humanos", dijo Jonathan Realmuto, profesor asistente de ingeniería mecánica de la UCR y líder del proyecto. "Lo que buscamos al usar materiales como el nailon y el elástico son esencialmente prendas robóticas".
Estas prendas contendrán regiones selladas y herméticas que pueden inflarse, haciéndolas temporalmente rígidas y proporcionando la fuerza para el movimiento.
"Digamos que quieres flexionar el codo para hacer una flexión de bíceps. Podemos inyectar aire en vejigas especialmente diseñadas incrustadas en la tela que impulsarían el brazo hacia adelante", dijo Realmuto.
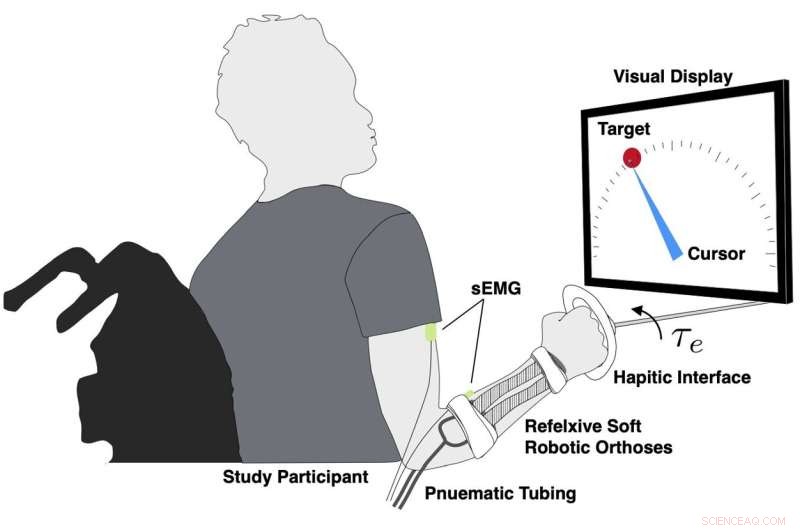
Configuración experimental para iteraciones anteriores del dispositivo. Crédito:Jonathan Realmuto/UCR
El proyecto se centrará no solo en la construcción del robot, sino también en el desarrollo de algoritmos que le enseñen a la máquina a predecir los movimientos que el usuario desea ejecutar.
"Uno de los desafíos críticos para brindar asistencia de movimientos es interpretar la intención de una persona. Queremos un "controlador volitivo", para que el robot se comporte en términos de lo que el humano quiere hacer", dijo Realmuto. El equipo del proyecto también incluye al profesor asistente de ingeniería mecánica de la UCR, Jun Sheng.
Un aspecto de dicho controlador es el uso de una variedad de pequeños sensores en las mangas para detectar pequeños voltajes generados por los músculos cuando se contraen. Estos sensores alimentarán los datos de voltaje en un algoritmo que será entrenado para extraer de ellos la intención del usuario.
El uso de textiles ampliamente disponibles, en lugar de materiales rígidos tradicionales, probablemente mantendrá bajo el costo de las mangas. Además, el equipo pretende minimizar el uso de dispositivos electrónicos sofisticados, lo que también ayudará a reducir los costos generales para los pacientes.
Este proyecto se lleva a cabo en asociación con el Children's Hospital of Orange County, donde los pacientes de una clínica pediátrica de trastornos del movimiento ayudarán a probar y refinar los prototipos.
Además, el equipo de investigación realizará reuniones anuales en el hospital para cada uno de los cuatro años del proyecto. Estas reuniones incluirán a los pacientes y sus familias, así como a los terapeutas ocupacionales, y obtendrán sus comentarios sobre la tecnología a medida que se desarrolla.

Comenzando desde la izquierda, el actuador está en un estado despresurizado y avanza hacia el inflado a presiones crecientes. Crédito:Jonathan Realmuto/UCR
"Al centrar a las partes interesadas en nuestro proceso de diseño, esperamos desarrollar un producto que realmente funcione para ellos", dijo Realmuto.
El equipo de desarrollo considera que este trabajo mejora la independencia no solo de los propios pacientes pediátricos, sino también de comunidades enteras.
"Si podemos ayudar a los niños a cepillarse los dientes, verter agua o abrir puertas, acciones que otros dan por sentadas, es una gran victoria para ellos", dijo Realmuto. "Pero también es una victoria para sus familias y cuidadores".
Aunque este proyecto se centra en niños con trastornos del movimiento, la tecnología se puede usar eventualmente para otras aplicaciones y poblaciones, incluidos pacientes geriátricos y otros adultos con problemas de movimiento.
"Nuestra tecnología es universal", dijo Realmuto. Profesor de ingeniería mecánica para diseñar un robot 'suave' que podría usarse en el espacio