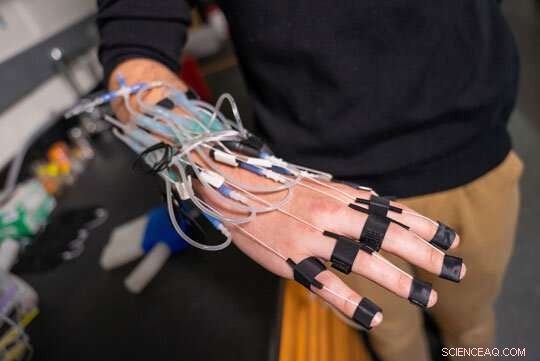
El estudiante de la Universidad de Rice, Colter Decker, estudiante de último año con especialización en ingeniería mecánica, muestra un guante que se usó para demostrar las características analógicas del circuito de control neumático suave para la robótica suave. Crédito:Brandon Martin/Universidad Rice
Agregue analógico y accionado por aire a la lista de opciones de sistemas de control para robots blandos.
En un estudio publicado en línea esta semana, investigadores de robótica, ingenieros y científicos de materiales de la Universidad de Rice y la Universidad de Harvard demostraron que es posible hacer circuitos programables no electrónicos que controlen las acciones de los robots blandos mediante el procesamiento de información codificada en ráfagas de aire comprimido.
"Parte de la belleza de este sistema es que realmente podemos reducir la computación a sus componentes básicos", dijo Colter Decker, estudiante de secundaria de Rice, autor principal del estudio en Proceedings of the National Academy of Sciences . Dijo que los sistemas de control electrónico se han perfeccionado y refinado durante décadas, y la recreación de circuitos informáticos "con análogos a la presión y el caudal en lugar de la tensión y la corriente" facilitó la incorporación del cálculo neumático.
Decker, un estudiante de último año con especialización en ingeniería mecánica, construyó su sistema de control robótico blando principalmente a partir de materiales cotidianos como popotes de plástico y gomas elásticas. A pesar de su simplicidad, los experimentos demostraron que las puertas lógicas accionadas por aire del sistema podían configurarse para realizar operaciones llamadas funciones booleanas que son la base de la informática moderna.
"El objetivo nunca fue reemplazar por completo las computadoras electrónicas", dijo Colter. Dijo que hay muchos casos en los que los robots blandos o los dispositivos portátiles solo necesitan programarse para unos pocos movimientos simples, y es posible que la tecnología demostrada en el documento "sería mucho más económica y segura de usar y mucho más duradera" que los controles electrónicos tradicionales.
Como estudiante de primer año, Decker comenzó a trabajar en el laboratorio de Daniel Preston, profesor asistente de ingeniería mecánica en Rice. Decker estudió sistemas de control de fluidos y se interesó en crear uno cuando ganó una beca de investigación de verano competitiva que le permitiría pasar unos meses trabajando en el laboratorio del químico y científico de materiales de Harvard George Whitesides.
El proyecto se convirtió en una colaboración de un mes entre los dos grupos de investigación, y Decker tuvo nueve coautores en el estudio, incluidos los coautores correspondientes Preston y Whitesides.
Decker y sus colegas crearon dos componentes, un actuador similar a un pistón que traduce la presión del aire en fuerza mecánica y una válvula que se puede cambiar entre dos estados:apagado y encendido. Los componentes estaban hechos de partes que incluían pajitas de plástico para beber, tubos de plástico flexibles, bandas elásticas, papel pergamino y láminas de poliuretano termoplástico que podían unirse con una prensa térmica de escritorio o una plancha caliente.
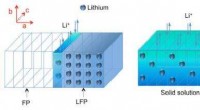
El equipo de investigación demostró que los dos componentes podrían combinarse en un solo dispositivo, una válvula biestable que funciona como un interruptor y usa presión de aire como entrada y salida. Se necesita una cantidad específica de presión de aire para mover el interruptor entre los estados de apagado y encendido. Las válvulas se mantienen cerradas con bandas elásticas y se programan sumando o restando bandas elásticas, lo que cambia la cantidad de presión requerida para la activación. En las pruebas, Decker demostró que los circuitos podrían usarse para controlar un robot suave con forma de mano, un cojín neumático y un robot del tamaño de una caja de zapatos que podía caminar una cantidad preprogramada de pasos, recuperar un objeto y regresar a su ubicación inicial.
"El mayor logro de este trabajo es la incorporación de control tanto digital como analógico en la misma arquitectura del sistema", dijo Preston. Teniendo ambos medios, los circuitos de control neumático se pueden programar digitalmente, con los "unos y ceros que se imaginan en una computadora tradicional. Pero también podemos traer capacidades analógicas, cosas que son continuas", dijo. "Eso nos permite simplificar realmente la arquitectura general del sistema y lograr nuevas capacidades a las que no se podía acceder en trabajos anteriores". Los wearables dan un paso 'lógico' hacia el control a bordo