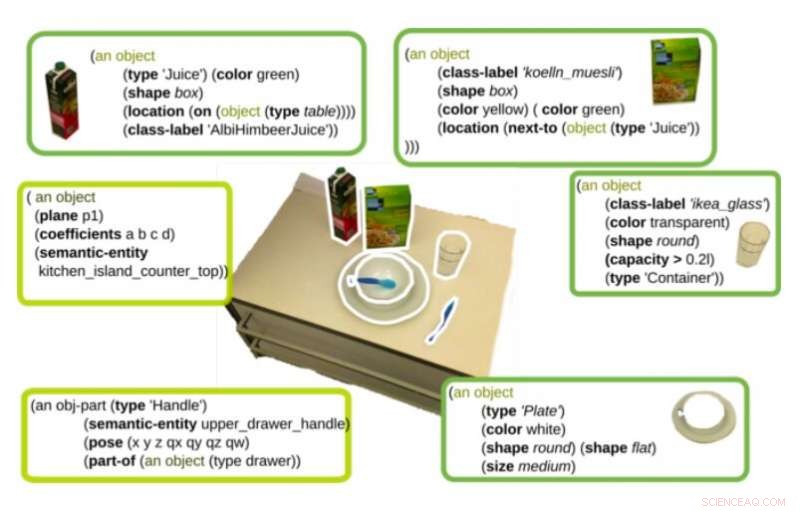
Una descripción semánticamente rica de una escena de desayuno. Crédito:Bálint-Benczédi et al.
Durante la última década más o menos, Los avances en el aprendizaje automático han permitido el desarrollo de sistemas que son cada vez más autónomos, incluidos los vehículos autónomos, asistentes virtuales y robots móviles. Entre otras cosas, Los investigadores que desarrollan sistemas autónomos necesitan identificar formas de integrar componentes diseñados para abordar subtareas diferentes pero complementarias.
Por ejemplo, Un robot que realiza tareas manuales en la casa de un usuario humano debería poder detectar objetos en su entorno y, al mismo tiempo, recuperar información sobre estos objetos que luego se puede utilizar para planificar sus movimientos y acciones. Este proceso, también conocido como el paradigma "percepción-cognición-acción", es de crucial importancia, ya que, en última instancia, permite al robot idear estrategias útiles y completar tareas de manera eficiente.
Hasta aquí, La mayoría de los métodos para implementar este paradigma de percepción-cognición-acción en robots tratan estas tres tareas como módulos casi completamente independientes que actúan como cajas negras entre sí. Un equipo de investigadores de la Universidad de Bremen y la Universidad de Munich en Alemania, sin embargo, cree que vincular el sistema de "percepción" de un robot con su cognición (es decir, su capacidad para "razonar" o recuperar información sobre objetos en el entorno circundante) podría mejorar significativamente su rendimiento general.
Teniendo esto en cuenta, Los investigadores desarrollaron recientemente un sistema de percepción cognitiva que podría mejorar el rendimiento de los robots móviles en las tareas de manipulación cotidianas. Este sistema, apodado ROBOSHERLOCK, logra la percepción a través de análisis de contenido (CA), una estrategia que implica el uso de métodos estadísticos para analizar grandes cantidades de datos.
Los datos analizados por ROBOSHERLOCK son "no estructurados, "dado que su estructura no refleja la semántica asociada a ella, como lo haría en una base de datos o una hoja de cálculo. Por tanto, el sistema utiliza una estrategia conocida como gestión de información no estructurada (UIM), lo que esencialmente significa que puede procesar grandes cantidades de datos no estructurados (por ejemplo, documentos de texto, archivos de sonido, imagenes etc.) utilizando un conjunto de algoritmos de extracción de información. Cada uno de estos algoritmos extrae diferentes tipos de conocimiento en función de su "experiencia, "y posteriormente se clasifican y combinan para llegar a una única decisión coherente.
"En ROBOSHERLOCK, La percepción e interpretación de escenas realistas se formula como un problema de gestión de información no estructurada (UIM), "escribieron los investigadores en su artículo." La aplicación del principio UIM apoya la implementación de sistemas de percepción que pueden responder consultas relevantes para la tarea sobre objetos en una escena, impulsar el rendimiento del reconocimiento de objetos combinando las fortalezas de múltiples algoritmos de percepción, Apoyar el razonamiento basado en el conocimiento sobre los objetos y permitir la generación automática y basada en el conocimiento de procesos de procesamiento ".
Los investigadores evaluaron su marco en una serie de pruebas, aplicándolo a diferentes sistemas para la percepción de escenas del mundo real. Descubrieron que el "razonamiento" sobre (es decir, procesamiento) el conocimiento previo recuperado por sus algoritmos permite a ROBOSHERLOCK responder una amplia variedad de preguntas, ir más allá de lo que era se percibe directamente en el entorno circundante.
Los componentes de ROBOSHERLOCK presentados por los investigadores en su estudio reciente podrían verse como sus funcionalidades centrales. Después, los investigadores también han desarrollado varias extensiones que mejoran las capacidades cognitivas del sistema. Por ejemplo, crearon una extensión que permite al sistema detectar humanos y objetos simultáneamente, razonamiento sobre las acciones que los humanos están realizando y las intenciones detrás de estas acciones.
"Más recientemente, Hemos investigado cómo el marco ROBOSHERLOCK puede permitir a los agentes 'soñar' y utilizando motores de juego de última generación generar variaciones de una tarea y aprender nuevos modelos de percepción. ", escribieron los investigadores en su artículo." Todas estas extensiones miran la percepción del robot desde la perspectiva de un robot que realiza tareas, lo que no hubiera sido posible sin el marco básico que se presenta aquí ".
© 2019 Science X Network