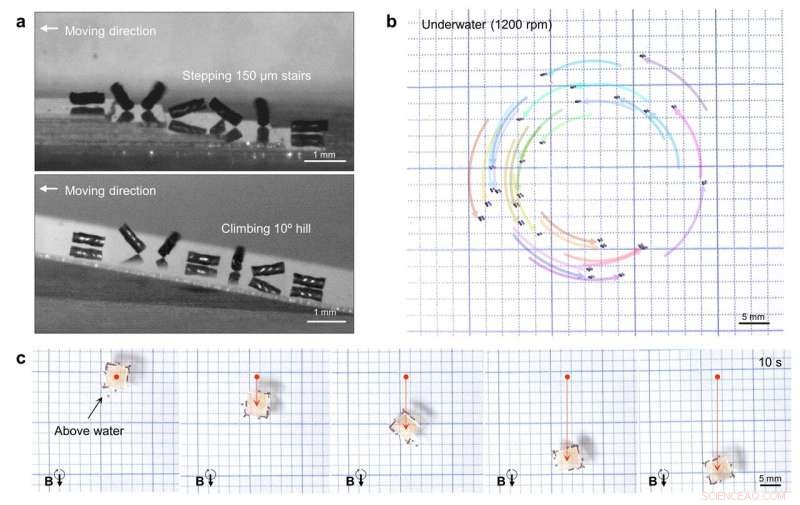
La magnetomotilidad jerárquica impulsada por movimientos giratorios y giratorios de robots blandos magnéticos helicoidales permite (a) escalar obstáculos, (b) natación bajo el agua de múltiples robots blandos, y (c) transporte colectivo de carga mediante un solo eje rotatorio de imanes permanentes. Crédito:Universidad Inha
Los robots blandos magnéticos son una opción prometedora para el control sin contacto en entornos confinados mediante estímulos magnéticos externos. Movimientos inducidos por magneto, es decir., magnetomotilidad, son impulsados por la deformación local de un robot mediante el cual se programan alineaciones de partículas y distribuciones polares alternas en el cuerpo. Los intentos de programar la anisotropía magnética en los robots blandos se han realizado mediante impresión láser directa (DLP), estereolitografía (SLA) y fabricación de filamentos fundidos (FDM) combinados con manipulación multiaxial de electroimanes.
Ahora, Los investigadores han demostrado métodos fáciles de preparación y actuación de robots blandos magnéticos sin regulación electromagnética. Construyeron un robot blando helicoidal tridimensional mediante la torsión de una película compuesta de polímero bidimensional. Los nanocompuestos termoplásticos de poliuretano-magnetita permitieron una super-torsión de las películas debido a su alta elongación; El uso de materiales termoplásticos también permitió que la arquitectura retorcida se fijara térmicamente. El denso cuerpo helicoidal de los robots blandos magnéticos permitía la magnetomotilidad jerárquica, incluidas las rotaciones en sentido horario y antihorario resultantes de dos imanes permanentes con un solo eje de rotación que gira en sentido horario debajo de los sustratos.
En la manipulación magnética de múltiples robots blandos, El control del robot individual sigue siendo una maniobra intrincada, ya que la trayectoria respectiva de cada robot se coordina simultáneamente a lo largo de diferentes caminos. El funcionamiento sin batería de estos múltiples robots magnéticos suaves se realizó a través de variaciones en las frecuencias de los imanes giratorios en el plano, ya que los robots suaves con diferentes relaciones de aspecto se activaron con otros modos de rotación:rotación, pivotante y volteretas, incluso a idéntica velocidad de rotación. Además de la maniobra orbital de radios, velocidades, y caminos de los múltiples robots blandos, la locomoción ágil hasta 60 de longitud corporal s-1 y la magnetomotilidad jerárquica ayudaron a los robots blandos a subir obstáculos como escaleras, colinas y superficies arrugadas bajo una fuente magnética que gira perpetuamente y sin la regulación multidireccional de los campos magnéticos.
Los investigadores también demostraron la cooperación entre múltiples robots blandos magnéticos inspirados en la calidad colectiva del transporte de carga en las colonias de hormigas. El comportamiento colectivo es una observación común en la naturaleza con ejemplos que se encuentran en la migración celular, colonias de hormigas, y bancos de peces, para nombrar unos pocos. Sin embargo, Es difícil lograr este diseño en robots colectivos porque la dinámica de los movimientos robóticos individuales y colectivos debe optimizarse a partir de análisis tanto computacionales como experimentales. Estos requisitos se vuelven innecesarios en el presente estudio, ya que las fuerzas capilares actúan para sujetar los robots blandos giratorios y giratorios alrededor de la carga. La reubicación de los imanes debajo de los robots facilita el transporte de objetos pesados similar al comportamiento de trabajo de las hormigas.
Estas técnicas novedosas de maniobras orbitales bajo demanda a través de la magnetomotilidad jerárquica pueden expandirse para aplicaciones biomédicas donde los nadadores magnéticos miniaturizados pueden potencialmente administrar medicamentos en espacios con configuraciones complejas.