Incluso en aguas inexploradas un sistema robótico desarrollado por el MIT puede detectar de manera eficiente lugares difíciles de encontrar para recolectar muestras. Cuando se implementa en barcos autónomos desplegados frente a la costa de Barbados (en la foto), el sistema encontró rápidamente la cabeza de coral más expuesta, lo que significa que estaba ubicada en el lugar menos profundo, lo cual es útil para estudiar cómo la exposición al sol afecta a los organismos de coral. Crédito:Instituto de Tecnología de Massachusetts
Un sistema robótico autónomo inventado por investigadores del MIT y la Institución Oceanográfica Woods Hole (WHOI) detecta de manera eficiente los puntos de muestreo más científicamente interesantes, pero difíciles de encontrar, en vastas regiones aguas inexploradas.
Los científicos ambientales a menudo están interesados en recolectar muestras en los lugares más interesantes, o "maxima, "en un entorno. Un ejemplo podría ser una fuente de fugas de productos químicos, donde la concentración es la más alta y en su mayoría no se ve afectada por factores externos. Pero un máximo puede ser cualquier valor cuantificable que los investigadores quieran medir, como la profundidad del agua o las partes del arrecife de coral más expuestas al aire.
Los esfuerzos para implementar robots de búsqueda máxima adolecen de problemas de eficiencia y precisión. Comúnmente, los robots se moverán de un lado a otro como cortadoras de césped para cubrir un área, que lleva mucho tiempo y recopila muchas muestras poco interesantes. Algunos robots detectan y siguen senderos de alta concentración hasta la fuente de la fuga. Pero pueden ser engañados. Por ejemplo, los productos químicos pueden quedar atrapados y acumularse en grietas lejos de una fuente. Los robots pueden identificar esos puntos de alta concentración como la fuente, pero no estar cerca.
En un documento que se presenta en la Conferencia Internacional sobre Robots y Sistemas Inteligentes (IROS), los investigadores describen "PLUMES, "un sistema que permite a los robots móviles autónomos concentrarse en un máximo mucho más rápido y de manera más eficiente. PLUMES aprovecha las técnicas probabilísticas para predecir qué caminos es probable que conduzcan al máximo, mientras navega obstáculos, corrientes cambiantes, y otras variables. A medida que recolecta muestras, sopesa lo aprendido para determinar si continuar por un camino prometedor o buscar lo desconocido, que puede albergar muestras más valiosas.
En tono rimbombante, PLUMES llega a su destino sin quedar atrapado en esos lugares complicados de alta concentración. "Eso es importante, porque es fácil pensar que has encontrado oro pero realmente has encontrado el oro de los tontos "dice la co-primera autora Victoria Preston, un doctorado estudiante del Laboratorio de Informática e Inteligencia Artificial (CSAIL) y del Programa Conjunto MIT-WHOI.
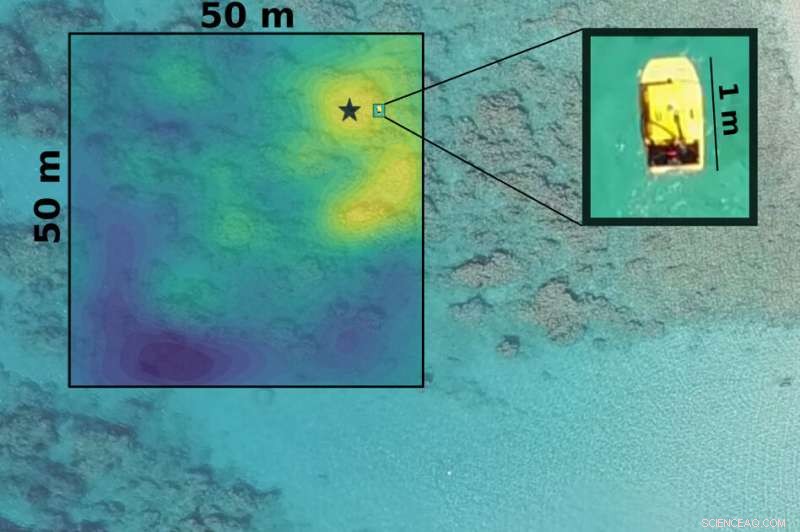
Los investigadores construyeron un bote robótico impulsado por PLUMES que detectó con éxito la cabeza de coral más expuesta en el arrecife de Bellairs Fringing Reef en Barbados, es decir, estaba ubicado en el lugar menos profundo, lo cual es útil para estudiar cómo la exposición al sol afecta a los organismos de coral. En 100 ensayos simulados en diversos entornos submarinos, un robot PLUMES virtual también recolectó de manera consistente de siete a ocho veces más muestras de máximos que los métodos de cobertura tradicionales en los períodos de tiempo asignados.
"PLUMES realiza la exploración mínima necesaria para encontrar el máximo y luego se concentra rápidamente en recolectar muestras valiosas allí, "dice la co-primera autora Genevieve Flaspohler, un doctorado estudiante y en CSAIL y el Programa Conjunto MIT-WHOI.
Junto a Preston y Flaspohler en el papel están:Anna P.M. Michel y Yogesh Girdhar, ambos científicos del Departamento de Ingeniería y Física Oceánica Aplicada del WHOI; y Nicholas Roy, profesor en CSAIL y en el Departamento de Aeronáutica y Astronáutica.
Navegando por una compensación exploit-explore
Una idea clave de PLUMES fue el uso de técnicas que van de la probabilidad a la razón para navegar por el compromiso notoriamente complejo entre explotar lo aprendido sobre el medio ambiente y explorar áreas desconocidas que pueden ser más valiosas.
"El mayor desafío en la búsqueda máxima es permitir que el robot equilibre la explotación de información de lugares que ya sabe que tienen altas concentraciones y la exploración de lugares de los que no sabe mucho". "Dice Flaspohler." Si el robot explora demasiado, no recolectará suficientes muestras valiosas como máximo. Si no explora lo suficiente, puede perder el máximo por completo ".
Cayó en un nuevo entorno, un robot impulsado por PLUMES utiliza un modelo estadístico probabilístico llamado proceso gaussiano para hacer predicciones sobre variables ambientales, como concentraciones químicas, y estimar las incertidumbres de detección. PLUMES luego genera una distribución de posibles caminos que el robot puede tomar, y utiliza los valores e incertidumbres estimados para clasificar cada ruta según lo bien que permite que el robot explore y explote.
En primer lugar, PLUMES elegirá caminos que exploren el entorno al azar. Cada muestra, sin embargo, proporciona nueva información sobre los valores objetivo en el entorno circundante, como los puntos con las concentraciones más altas de sustancias químicas o las profundidades más bajas. El modelo de proceso gaussiano explota esos datos para delimitar las posibles rutas que el robot puede seguir desde su posición dada para tomar muestras de ubicaciones con un valor aún mayor. PLUMES utiliza una función objetiva novedosa, comúnmente utilizada en el aprendizaje automático para maximizar una recompensa, para determinar si el robot debe explotar el conocimiento pasado o explorar la nueva área.
Caminos "alucinantes"
La decisión de dónde recolectar la siguiente muestra se basa en la capacidad del sistema para "alucinar" todas las posibles acciones futuras desde su ubicación actual. Para hacerlo aprovecha una versión modificada de Monte Carlo Tree Search (MCTS), una técnica de planificación de rutas popularizada para impulsar sistemas de inteligencia artificial que dominan juegos complejos, como Go y Chess.
MCTS utiliza un árbol de decisiones, un mapa de nodos y líneas conectados, para simular una ruta, o secuencia de movimientos, necesario para llegar a una acción ganadora final. Pero en los juegos el espacio para posibles caminos es finito. En entornos desconocidos, con dinámicas cambiantes en tiempo real, el espacio es efectivamente infinito, haciendo que la planificación sea extremadamente difícil. Los investigadores diseñaron "MCTS de observación continua, "que aprovecha el proceso gaussiano y la función objetiva novedosa para buscar en este espacio difícil de manejar de posibles caminos reales.
La raíz de este árbol de decisiones de MCTS comienza con un nodo de "creencia", que es el siguiente paso inmediato que puede dar el robot. Este nodo contiene el historial completo de las acciones y observaciones del robot hasta ese momento. Luego, el sistema expande el árbol desde la raíz en nuevas líneas y nodos, revisar varios pasos de acciones futuras que conducen a áreas exploradas e inexploradas.
Luego, el sistema simula lo que sucedería si tomara una muestra de cada uno de esos nodos recién generados, basado en algunos patrones que ha aprendido de observaciones anteriores. Dependiendo del valor del nodo simulado final, todo el camino recibe una puntuación de recompensa, con valores más altos que equivalen a acciones más prometedoras. Las puntuaciones de recompensa de todos los caminos se revierten al nodo raíz. El robot selecciona la ruta con la puntuación más alta, da un paso, y recoge una muestra real. Luego, utiliza los datos reales para actualizar su modelo de proceso gaussiano y repite el proceso de "alucinación".
"Mientras el sistema continúe alucinando que puede haber un valor más alto en partes invisibles del mundo, debe seguir explorando, "Dice Flaspohler." Cuando finalmente converge en un punto, se estima que es el máximo, porque no puede alucinar un valor superior a lo largo del camino, luego deja de explorar ".
Ahora, los investigadores están colaborando con científicos de WHOI para utilizar robots impulsados por PLUMES para localizar columnas químicas en sitios volcánicos y estudiar las liberaciones de metano en los estuarios costeros que se derriten en el Ártico. Los científicos están interesados en la fuente de gases químicos liberados a la atmósfera, pero estos sitios de prueba pueden abarcar cientos de millas cuadradas.
"Pueden [usar PLUMES para] pasar menos tiempo explorando esa enorme área y realmente concentrarse en recolectar muestras científicamente valiosas, "Dice Preston.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.