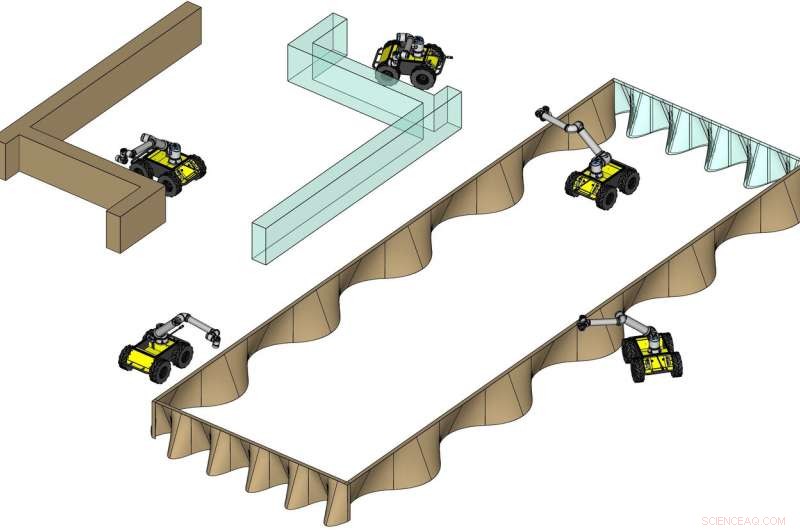
Un equipo de robótica multidisciplinario compuesto por profesores de la Escuela de Ingeniería de NYU Tandon está diseñando sistemas de control para impresoras 3D en brazos robóticos en la parte superior de un dispositivo móvil, plataformas itinerantes. Funcionando en equipos - un concepto llamado fabricación aditiva colectiva (CAM) - estas impresoras, con aprendizaje automático y otras capacidades de inteligencia artificial (IA), podría reparar estructuras cívicas; trabajar en profundidades oceánicas y zonas de desastre; o incluso ir al espacio para trabajar en la Luna, Marte, y más allá. Crédito:NYU Tandon
La impresión comercial 3D, o fabricación aditiva (AM), es una industria en auge. Pero si las impresoras se liberaran de la configuración típica que involucra una caja inmóvil y un pórtico, y puesto en libertad para trabajar en itinerancia, equipos colaborativos, el negocio de AM podría ser mucho más grande con muchas más aplicaciones, incluso como albañiles robóticos en sitios de construcción y reparación de infraestructura civil urbana y rural en ruinas.
Un equipo de robótica multidisciplinario en la NYU Tandon School of Engineering, organizado por el Centro de Ciencia y Progreso Urbano (CUSP) de la NYU y apoyado por una subvención de $ 1.2 millones de la Fundación Nacional de Ciencias (NSF), está trabajando para hacer realidad el concepto mediante el diseño de sistemas autónomos para impresoras 3-D en brazos robóticos conectados a dispositivos móviles, plataformas itinerantes. Funcionando en equipos, un concepto llamado fabricación aditiva colectiva (CAM), estas impresoras, con aprendizaje automático y otras capacidades de inteligencia artificial (IA), podría reparar puentes, túneles y otras estructuras cívicas; trabajar en profundidades oceánicas y zonas de desastre; o incluso ir al espacio para trabajar en la Luna, Marte, y más allá.
Los investigadores, Chen Feng, Maurizio Porfiri, Ludovic Righetti, y Weihua Jin, profesores de los Departamentos de Ingeniería Civil y Urbana, Ingeniería Mecánica y Aeroespacial, e Ingeniería Eléctrica e Informática, se centrará en tres áreas críticas para hacer viables los equipos CAM de impresión 3D:autonomía, control, redes y sistemas en tiempo real:
Feng explicó que el objetivo es la precisión, eficiencia, y adaptabilidad al medio ambiente ya las condiciones en tiempo real, más bien la forma en que una aplicación de navegación redirige un vehículo que detecta que se ha desviado de un rumbo mapeado. A diferencia del típico servicio de navegación basado en GPS, sin embargo, los ajustes deben ser ultrarrápidos y precisos de unos pocos milímetros, no unas pocas docenas de pies. Añadió que la combinación única de experiencia en robótica del equipo, inteligencia artificial, teoría de control, y los sistemas dinámicos hacen que los desafíos sean superables.
Feng se centrará en la planificación y la localización, abordar desafíos tales como cómo permitir que el robot identifique cuándo y cuándo no necesita un alto grado de precisión para localizarse.
"El robot debe poder moverse rápidamente al área de impresión, observar las condiciones reales, como terrenos irregulares, dado que el mundo real no es plano, haga las compensaciones de inmediato, ", dijo." Y aunque queremos tener un mayor grado de precisión en el área de la estructura, cuanto más lejos esté de la estructura, menos necesitará, ", explicó." Esto implicará un nuevo tipo de localización proactiva ".
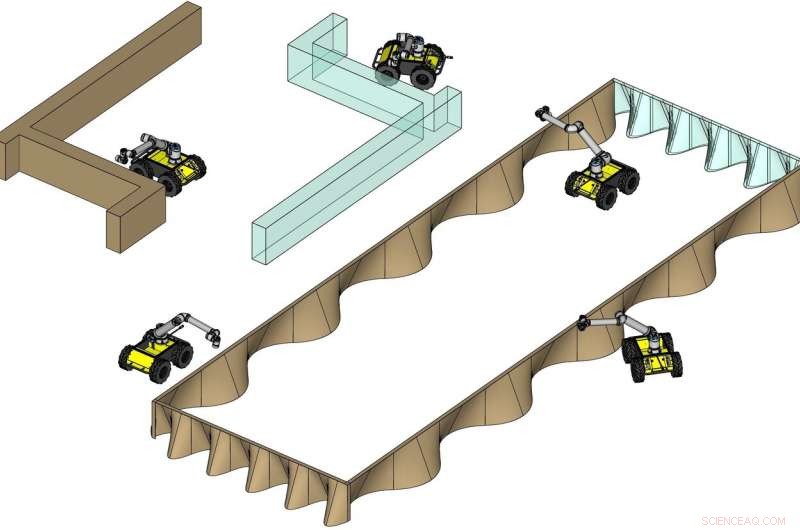
Los profesores de NYU Tandon, Chen Feng, Ludovic Righetti y Maurizio Porfiri están diseñando sistemas para la fabricación aditiva colectiva, en el que equipos de robots móviles de impresión 3D trabajan juntos para reparar o construir estructuras, o incluso trabajar en la luna o en Marte. Crédito:NYU Tandon
Righetti trabajará en algoritmos de control óptimos en tiempo real de cada impresora móvil, para permitir que el robot se adapte rápidamente al entorno.
"Cada robot tiene que observar lo que se imprime, asociarlo de forma autónoma con el diseño del proyecto, y reconocer instantáneamente si la estructura impresa se ha desviado de ella, y por cuanto, y al mismo tiempo decidir cuáles son las siguientes mejores acciones para garantizar la impresión adecuada de la estructura, " él dijo.
Porfiri desarrollará un marco matemático para permitir que los robots coordinen de forma autónoma sus respectivas acciones dentro del entorno físico en evolución. permitiendo que múltiples impresoras móviles creen simultáneamente una estructura con mayor eficiencia. Esta capacidad sería especialmente importante en lugares como Marte, donde no hay un servidor remoto lo suficientemente cerca para controlar los esfuerzos coordinados de los robots sin un retraso de tiempo.
"A diferencia de los drones que vuelan en formación o de los coches autónomos que mantienen distancia entre sí, Nuestras impresoras móviles dejan una huella única en el entorno físico:el objeto que se imprime. Mi trabajo aprovechará esta huella para establecer algoritmos efectivos para la coordinación y la impresión colectiva ".
Jin ayudará al equipo a desarrollar nuevos materiales compuestos adecuados para la impresión móvil de hormigón en 3D. El equipo planea demostrar la efectividad de los algoritmos mediante la impresión 3D en el mundo real de esos nuevos hormigones utilizando impresoras móviles que construirán en NYU Tandon.
"Para liberar todo el potencial de la fabricación aditiva colectiva, Deben superarse varias fronteras científicas, asegurando el despliegue óptimo de múltiples robots móviles que imprimen grandes estructuras de acuerdo con una ingeniería, diseño virtual, "dijo Feng.
El proyecto incluye un taller de la industria sobre CAM, una exposición pública al aire libre, kit educativo asequible / abierto en CAM, Competencia CAM a escala de escritorio K-12, actividades emprendedoras y un esfuerzo de diversidad para estudiantes de todos los orígenes.