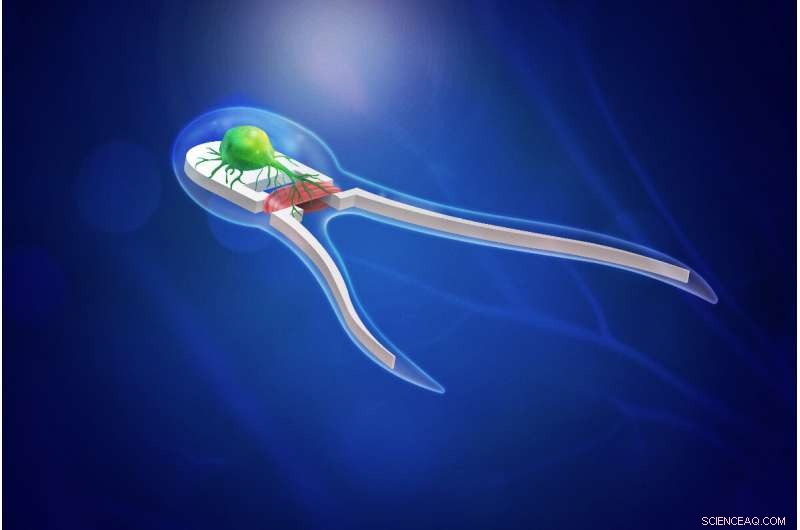
Representación artística de una nueva generación de biobots:dispositivos robóticos blandos alimentados por tejido del músculo esquelético estimulado por neuronas motoras integradas. Crédito:Michael Vincent
Los investigadores han desarrollado dispositivos robóticos blandos impulsados por tejido neuromuscular que se activan cuando son estimulados por la luz, lo que lleva a la ingeniería mecánica un paso más cerca del desarrollo de biobots autónomos.
En 2014, Los equipos de investigación dirigidos por el profesor de ingeniería y ciencias mecánicas Taher Saif y el profesor de bioingeniería Rashid Bashir de la Universidad de Illinois trabajaron juntos para desarrollar los primeros biobots biohíbridos autopropulsados que nadan y caminan, impulsados por células musculares cardíacas derivadas de ratas.
"Nuestro primer estudio de natación demostró con éxito que los bots, modelado a partir de los espermatozoides, de hecho podría nadar, "Dijo Saif." Esa generación de robots de cola simple utilizó tejido cardíaco que late por sí solo, pero no podían sentir el entorno ni tomar decisiones ".
En un nuevo estudio publicado en el procedimientos de la Academia Nacional de Ciencias y dirigido por Saif, Los investigadores demuestran una nueva generación de robots de dos colas alimentados por tejido del músculo esquelético estimulado por neuronas motoras integradas. Las neuronas tienen propiedades optogenéticas:tras la exposición a la luz, las neuronas se activarán para activar los músculos.
"Aplicamos un cultivo celular de neuronas optogenéticas, derivado de células madre de ratón, adyacente al tejido muscular, "Dijo Saif." Las neuronas avanzaron hacia el músculo y formaron uniones neuromusculares, y el nadador se reunió solo ".
Después de confirmar que el tejido neuromuscular era compatible con sus esqueletos sintéticos de biobot, el equipo trabajó para optimizar las habilidades del nadador.
El equipo de investigación incluye, desde la izquierda, profesor Taher Saif, el estudiante de posgrado Onur Aydin, estudiante de posgrado Xiastian Zhang, profesor Mattia Gazzola, el estudiante de posgrado Gelson J. Pagan-Diaz, sentado y profesor y decano de Grainger College of Engineering, Rashid Bashir. Crédito:L. Brian Stauffer
"Usamos modelos computacionales, dirigido por el profesor de ciencias mecánicas e ingeniería Mattia Gazzola, para determinar qué atributos físicos conducirían a la natación más rápida y eficiente, "Dijo Saif." Por ejemplo, observamos variaciones en el número de colas y longitudes de cola para el diseño más eficiente del nadador biohíbrido ".
"Dado que los actuadores biológicos, o biobots, no son tan maduras como otras tecnologías, son incapaces de producir grandes fuerzas. Esto hace que su movimiento sea difícil de controlar. "Es muy importante diseñar cuidadosamente el andamio alrededor del cual crecen los biobots y con el que interactúan para aprovechar al máximo la tecnología y lograr las funciones de locomotora", dijo Gazzola. Las simulaciones por computadora que ejecutamos desempeñan un papel fundamental en esta tarea, ya que podemos abarcar varios diseños posibles y seleccionar solo los más prometedores para probarlos en la vida real ".
"La capacidad de impulsar la actividad muscular con neuronas allana el camino para una mayor integración de las unidades neuronales dentro de los sistemas biohíbridos, ", Dijo Saif." Dada nuestra comprensión del control neuronal en animales, puede ser posible avanzar con el diseño neuromuscular biohíbrido mediante el uso de una organización jerárquica de redes neuronales ".
Saif dijo que él y su equipo visualizan este avance que conducirá al desarrollo de sistemas vivos de ingeniería multicelular con la capacidad de responder de manera inteligente a señales ambientales para aplicaciones en bioingeniería. tecnologías de la medicina y de los materiales autocurativos.
Sin embargo, el equipo reconoce que, al igual que los organismos vivos, no se desarrollarán dos máquinas biohíbridas para que sean exactamente iguales.
"Al igual que los gemelos no son realmente idénticos, dos máquinas diseñadas para realizar la misma función no serán iguales, "Dijo Saif." Uno puede moverse más rápido o curarse del daño de manera diferente al otro, un atributo único de las máquinas vivientes ".