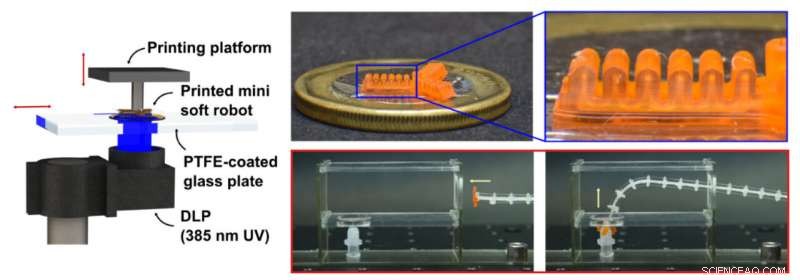
Se propone un flujo de proceso genérico para guiar la impresión 3D de actuadores neumáticos blandos en miniatura que son más pequeños que una moneda. Un removedor de escombros suave con una pinza en miniatura integrada puede realizar la navegación a través de un espacio confinado y la recolección de objetos pequeños en posiciones difíciles de alcanzar. Crédito:SUTD
Los robots blandos son una clase de sistemas robóticos hechos de materiales compatibles y capaces de adaptarse de forma segura a entornos complejos. Han experimentado un rápido crecimiento recientemente y vienen en una variedad de diseños que abarcan múltiples escalas de longitud, desde metros hasta submicrómetros.
En particular, Los pequeños robots blandos a escala milimétrica son de interés práctico, ya que pueden diseñarse como una combinación de actuadores en miniatura simplemente accionados por presión neumática. También son adecuados para la navegación en áreas reducidas y la manipulación de objetos pequeños.
Sin embargo, Reducir los robots neumáticos blandos a milímetros da como resultado características más finas que se reducen en más de un orden de magnitud. La complejidad del diseño de estos robots exige una gran delicadeza cuando se fabrican con procesos tradicionales como el moldeado y la litografía blanda. Aunque las tecnologías de impresión 3D emergentes como el procesamiento de luz digital (DLP) ofrecen altas resoluciones teóricas, Tratar con huecos y canales a microescala sin causar obstrucciones sigue siendo un desafío. En efecto, Son raros los ejemplos exitosos de robots neumáticos blandos en miniatura de impresión 3D.
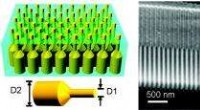
Recientemente, investigadores de Singapur y China, a saber, de la Universidad de Tecnología y Diseño de Singapur (SUTD), Universidad de Ciencia y Tecnología del Sur (SUSTech) y Universidad de Zhejiang (ZJU), propuso un flujo de proceso genérico para guiar la impresión 3D DLP de actuadores neumáticos en miniatura para robots blandos con un tamaño total de 2-15 mm y un tamaño de característica de 150-350 μm (consulte la imagen). Su investigación fue publicada en Tecnologías de materiales avanzadas .
"Aprovechamos la alta eficiencia y resolución de la impresión DLP 3-D para fabricar actuadores robóticos blandos en miniatura, "dijo el profesor asociado Qi (Kevin) Ge de SUSTech, investigador principal del proyecto de investigación. "Para garantizar una fidelidad de impresión fiable y un rendimiento mecánico en los productos impresos, introdujimos un nuevo paradigma para la adaptación sistemática y eficiente de la formulación del material y los parámetros clave de procesamiento ".
En la impresión DLP 3-D, Los fotoabsorbentes se agregan comúnmente a las soluciones de polímeros para mejorar las resoluciones de impresión tanto en dirección lateral como vertical. Mientras tanto, El aumento excesivo de la dosis conduce a una rápida degradación de la elasticidad del material, lo que es crucial para que los robots blandos soporten grandes deformaciones.
"Para lograr una compensación razonable, Primero seleccionamos un fotoabsorbente con buena absorbancia en la longitud de onda de la luz ultravioleta proyectada y determinamos la formulación de material apropiada en base a pruebas de rendimiento mecánico. Próximo, caracterizamos la profundidad de curado y la fidelidad XY para identificar la combinación adecuada de tiempo de exposición y espesor de capa cortada, "explicó el co-primer autor Yuan-Fang Zhang de SUTD.
"Al seguir este flujo de proceso, somos capaces de producir una variedad de actuadores robóticos neumáticos blandos en miniatura con varias estructuras y modos de transformación, todo más pequeño que una moneda de un dólar de Singapur, en un sistema de impresión 3D multimaterial de fabricación propia. La misma metodología debe ser compatible con las impresoras comerciales de estereolitografía (SLA) o DLP 3-D, ya que no se requiere ninguna modificación de hardware. ", dijo el autor correspondiente, el profesor Qi Ge de SUSTech.
Para ejemplificar las aplicaciones potenciales, Los investigadores también idearon un removedor de escombros blando que comprende un manipulador continuo y una pinza neumática blanda en miniatura impresa en 3D. Puede navegar por un espacio reducido y recoger objetos pequeños en posiciones difíciles de alcanzar.
El enfoque propuesto allana el camino para la impresión en 3D de robots blandos en miniatura con geometrías complejas y diseños multimateriales sofisticados. Esta integración de actuadores neumáticos blandos en miniatura impresos en un sistema robótico ofrece oportunidades para aplicaciones potenciales como el mantenimiento de motores a reacción y la cirugía mínimamente invasiva.